Senzori autonomnih automobila podložni su hakiranju. No i za to postoji rješenje
Nekoliko podatkovnih točaka ispred ili iza drugog automobila može pomaknuti percepciju sustava za nekoliko metara i zavarati tempomat da pomisli kako vozilo usporava ili ubrzava

Istraživači sa Sveučilišta Duke demonstrirali su strategiju napada koja može prevariti senzore vozila da povjeruju kako su obližnji objekti bliže (ili dalje) nego što se čine.
Strategija napada
Istraživanje sugerira da bi u autonomne automobile trebalo ugraditi mogućnosti dijeljenja podataka s obližnjim automobilima kako bi ih se potpuno zaštitilo. Rezultati će biti predstavljeni ovog kolovoza na sigurnosnom simpoziju USENIX 2022.
Najčešće korištena tehnologija lociranja kombinira 2D podatke s kamera i 3D podatke iz LiDAR-a, radara baziranog na laseru. No, novo istraživanje pokazalo je kako se ove sustave lako može zbuniti dodavanjem nekoliko točaka podataka u 3D oblak točaka ispred ili iza mjesta na kojem se objekt nalazi.
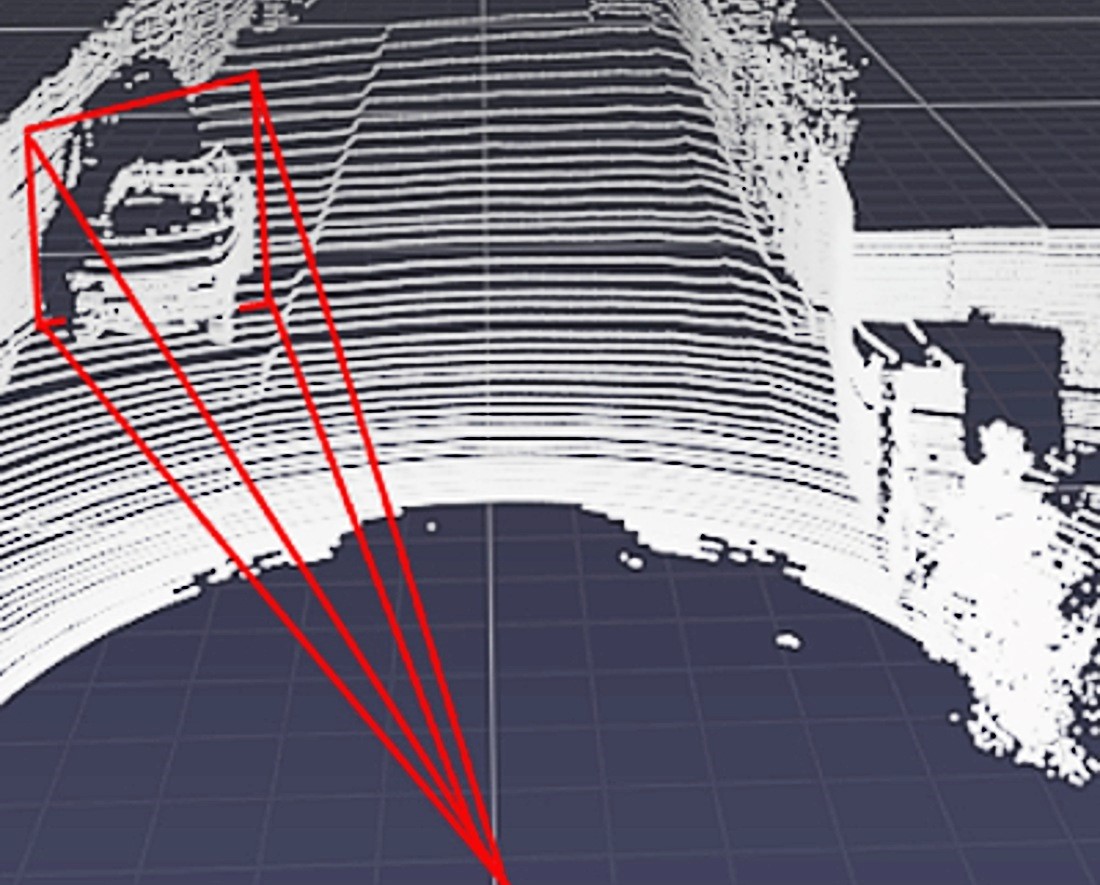
Nova strategija napada djeluje tako da laserski pištolj puca u LiDAR senzor automobila kako bi se njegovoj percepciji dodali lažni podaci. Podatkovne točke, pažljivo smještene unutar određenog područja 2D vidnog polja kamere, lako mogu zavarati sustav.

Ovo ranjivo područje proteže se ispred objektiva kamere u obliku udubljenja - 3D piramide odrezanog vrha. To znači da nekoliko podatkovnih točaka postavljenih ispred ili iza drugog obližnjeg automobila može pomaknuti percepciju sustava za nekoliko metara. To pak može zavarati adaptivni tempomat da pomisli kako vozilo usporava ili ubrzava.
Istraživači smatraju kako je mala šansa da netko postavi lasere na automobil ili objekt uz cestu kako bi varao vozila koja prolaze autocestom. Taj rizik se, međutim, značajno povećava u vojnim situacijama u kojima pojedina vozila mogu biti vrlo vrijedne mete. A pronađu li hakeri način da ove lažne podatkovne točke stvore bez upotrebe fizičkih lasera, puno vozila moglo bi se napasti odjednom.
Dva moguća rješenja
Rješenje je dodatna redundancija, odnosno opremanje vozila "stereo kamerama" s preklapajućim vidnim poljima koje bi mogle bolje procijeniti udaljenosti i primijetiti LiDAR podatke. Savršeno osiguranje cijelog vozila zahtijevalo bi više setova stereo kamera oko cijelog tijela kako bi se osigurala 100% pokrivenost.
Druga je mogućnost razvoj sustava u kojima automobili u neposrednoj blizini jedni drugima dijele neke svoje podatke. Fizički napadi vjerojatno neće moći utjecati na više automobila odjednom, a budući da različite marke automobila mogu imati različite operativne sustave, kibernetički napad vjerojatno neće moći pogoditi sve automobile odjednom, kažu istraživači.



















