Senzorski čip i bolja propusnost podataka za veću sigurnost u prometu
Kineski i pvicarski istraživači dosjetili su se dva načina na koji će poboljšati kvalitetu kamera u samovozećim vozilima


Senzori slike trebaju kombinirati dobru ukupnu kvalitetu vida za točnu interpretaciju scene s brzim otkrivanjem pokreta kako bi se omogućile brze reakcije. Međutim, kombiniranje željenih funkcija obično smanjuje učinkovitost uređaja i dovodi do nužnog kompromisa između kvalitete slike i latencije. No, dvije nove studije, objavljene u časopisu Nature, demonstriraju hibridne pristupe koji bi trebali zadovoljiti obje potrebe i istovremeno prevladati ograničenja.
Kineski pristup
Istraživači pekinškog Sveučilište Tsinghua razvili su tako senzorski čip inspiriran načinom na koji funkcionira ljudski vizualni sustav, kombinirajući brze, ali neprecizne osjete sa sporijim, ali preciznijim opažanjima.
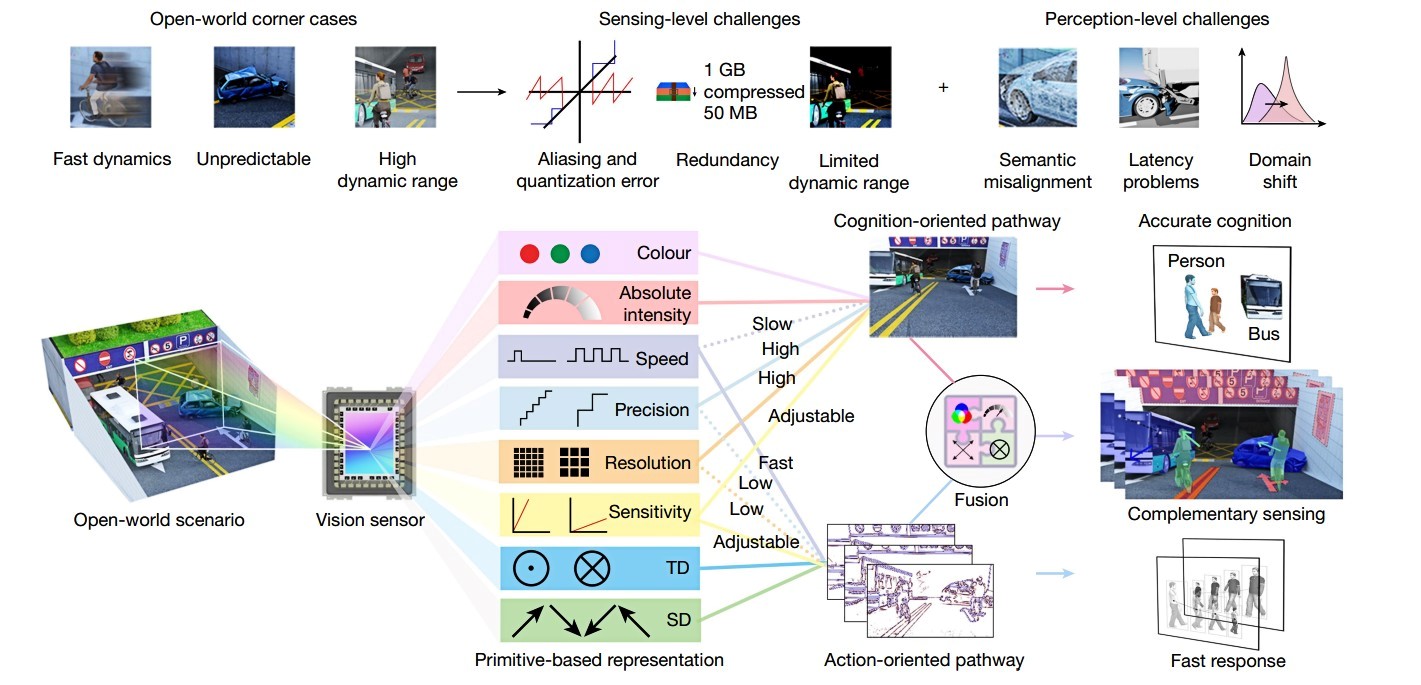
Njihov čip Tianmouc koristi hibridni niz piksela i kombinira brzo otkrivanje temeljeno na događajima kako bi se omogućili brzi odgovori na promjene bez potrebe za previše detalja sa sporom obradom kako bi se proizvela točna vizualizacija scene.
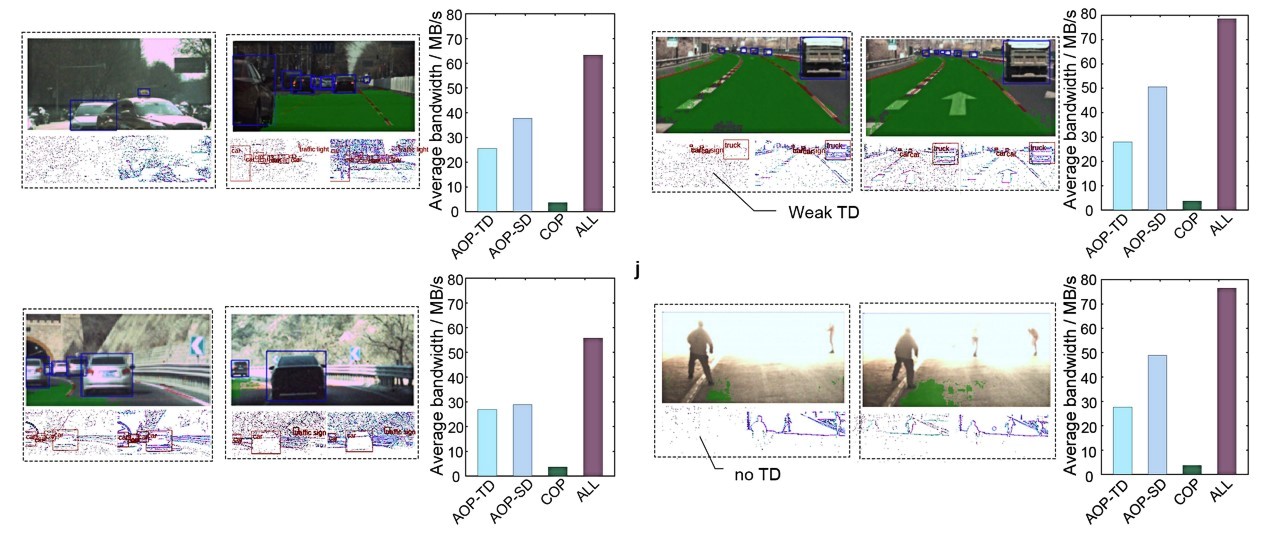
Tianmouc je uspješno testiran u nizu scenarija, uključujući vožnju kroz mračni tunel, reagiranje na smetnje bljeskalice kamere i otkrivanje osobe koja hoda ispred automobila.
Švicarski pristup
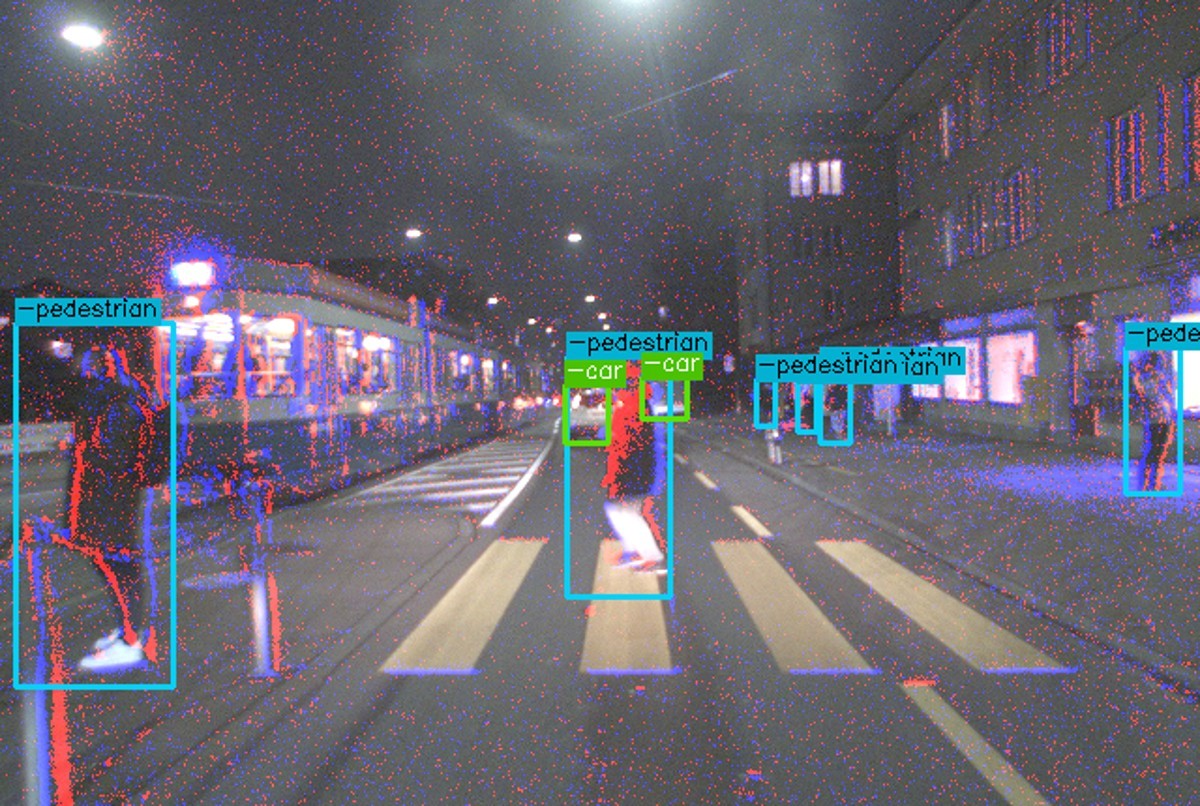
Istovremeno, istraživači Sveučilišta u Zürichu pozabavili su se kamerama koje se koriste za očitavanje vida. Kamere u punoj boji imaju dobru rezoluciju, ali im je potrebna velika količina obrade podataka za otkrivanje brzih promjena; smanjenje propusnosti dolazi po cijenu povećane latencije, a time i potencijalno smanjene sigurnosti. S druge strane, postoje i kamere koje dobro otkrivaju brzo kretanje, ali to čine sa smanjenom preciznošću.
Švicarski istraživači dokazali su da hibridni sustav može postići kvalitetnu detekciju objekata niske latencije za samovozeće automobile. Kombinacijom dviju kamera broj sličica u sekundi kamere u boji može se smanjiti, čime se smanjuje propusnost i povećava učinkovitost uz zadržavanje točnosti, dok kamera za događaje kompenzira veću latenciju u kameri u boji i osigurava pravovremeno otkrivanje pješaka i vozila u pokretu.
Oba pristupa, slažu se istraživači, omogućavaju bržu, učinkovitiju i robusniju obradu slika u samovozećim automobilima i drugim aplikacijama.




























