Laserski napad zasljepljuje autonomna vozila i briše pješake
Laseri koji osvijetle lidarski sustav mogu stvoriti mrtvi kut ispred vozila, dovoljno velik da potpuno sakrije pješake u pokretu i druge prepreke


Najsofisticiranija autonomna vozila obično koriste lidar, rotirajući radarski uređaj koji djeluje kao oči automobila. Lidar pruža stalne informacije o udaljenosti do objekata tako da automobil može odlučiti koje radnje je sigurno poduzeti. Ali ispada da se ove oči lako mogu prevariti.
Mrtvi kut
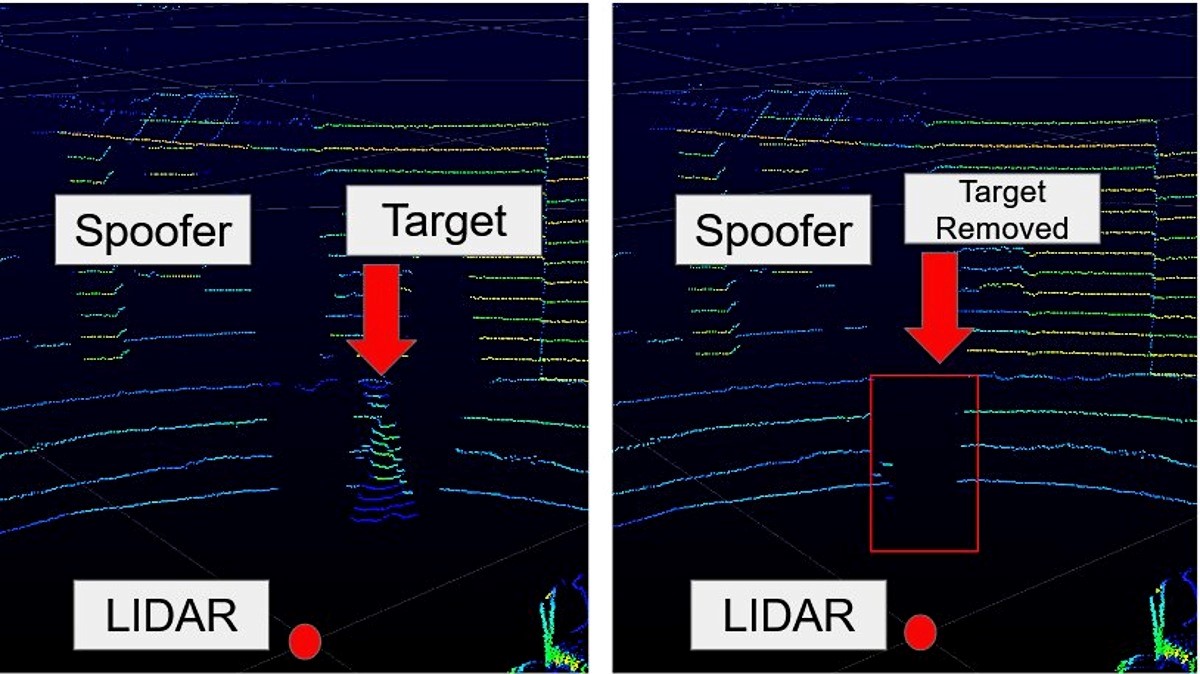
Nova istraživanja otkrivaju da laseri koji osvijetle lidarski sustav mogu stvoriti mrtvi kut ispred vozila, dovoljno velik da potpuno sakrije pješake u pokretu i druge prepreke. Izbrisani podaci uzrokuju da automobili misle da je cesta sigurna za nastavak kretanja i tako ugrožavaju sve što se može nalaziti u mrtvoj točki.
Ovu ranjivost sustava otkrili su istraživači Sveučilišta u Floridi, Sveučilišta u Michiganu i Sveučilišta za elektro-komunikacije u Japanu koji su odmah ponudili i nadogradnje sustava koje bi mogle eliminirati nedostatke i tako zaštititi ljude. Nalazi će biti predstavljeni na sigurnosnom simpoziju USENIX 2023, a trenutno se mogu pronaći na arXiv.
Lažni odrazi
Lidar radi emitiranjem laserskog svjetla i hvatanjem refleksije za izračunavanje udaljenosti, slično kao što eholokacija šišmiša koristi zvučne odjeke. Napad stvara lažne odraze koji poremete senzor. Istraživači su laserom oponašali refleksije lidara kako bi senzor umanjio druge refleksije koje dolaze od stvarnih prepreka.
To znači da lidar još uvijek prima prave podatke od prepreke, ali podaci se automatski odbacuju jer senzor percipira samo lažne odraze, objašnjavaju istraživači koji su demonstrirali napad na vozila i robote u pokretu s napadačem smještenim oko pet metara dalje uz rub ceste. U teoriji, to bi se s nadograđenom opremom moglo postići i iz veće udaljenosti.
Sinkronizacija s lidarom
Sva potrebna tehnologija prilično je osnovna, ali laser mora biti savršeno tempiran prema lidarskom senzoru, a vozila u pokretu moraju se pažljivo pratiti kako bi laser usmjeravao u pravom smjeru.
"Primarno se radi o sinkronizaciji lasera s lidar uređajem. Informacije koje trebate obično su javno dostupne od proizvođača", objašnjavaju istraživači koji su, koristeći ovu tehniku, uspjeli izbrisati podatke za statične prepreke i pješake koji se kreću. Pokazali su i da bi napad mogao pratiti vozilo koje se sporo kreće koristeći osnovnu opremu za praćenje kamerom.
Ažuriranje senzora
U simulacijama donošenja odluka autonomnog vozila, ovo brisanje podataka uzrokovalo je da automobil nastavi ubrzavati prema pješaku kojeg više nije mogao vidjeti umjesto da se zaustavi.
Ažuriranja lidar senzora ili softvera koji tumači neobrađene podatke mogla bi riješiti ovu ranjivost. Na primjer, proizvođači bi mogli naučiti softver da traži izdajničke potpise lažiranih odraza koje je dodao laserski napad, predlažu istraživači.














