Stereovizija za vožnju terenaca bez vozača
Sustav obrađuje podatke stereo kamera i tako eliminira potrebu za lidarom i drugim aktivnim senzorima


Istraživači Southwest Research Instituta (SwRI) razvili su sustav temeljen na vidu koji terenskim vozilima omogućuje autonomnu vožnju i izvan puteva. Sustav brađuje podatke stereo kamera i tako eliminira potrebu za lidarom i aktivnim senzorima koji se obično koriste na autonomnim vozilima.
Alternativa lidaru
Navigacijski paket alata Vision for Off-Road Autonomy (VORA) može percipirati objekte i modelirati okruženja u stvarnom vremenu. Sustav kamera zamišljen je naime kao alternativa lidaru, senzoru za otkrivanje svjetlosti i dometa koji emitira aktivne lasere za ispitivanje objekata i izračunavanje dubine i udaljenosti.
Iako vrlo pouzdan, lidar proizvodi svjetlo koje se lako može detektirati, baš kao i radari koji emitiraju radio valove. VORA sustav izbjegava ovakve probleme, a pritom se ne mora oslanjati na GPS navigaciju. Osim za vojsku, novi alat računalnog vida mogao bi se koristiti i u poljoprivredi, ali i istraživanju svemira.
VORA tehnologija je, kažu, kao stvorena za istraživanje planetarnih površina. Tamo gdje su autonomni roboti ograničeni napajanjem, kapacitetom nosivosti i povezanošću, kamere imaju više smisla od lidarskih sustava gladnih energije.
Dvije stereo slike
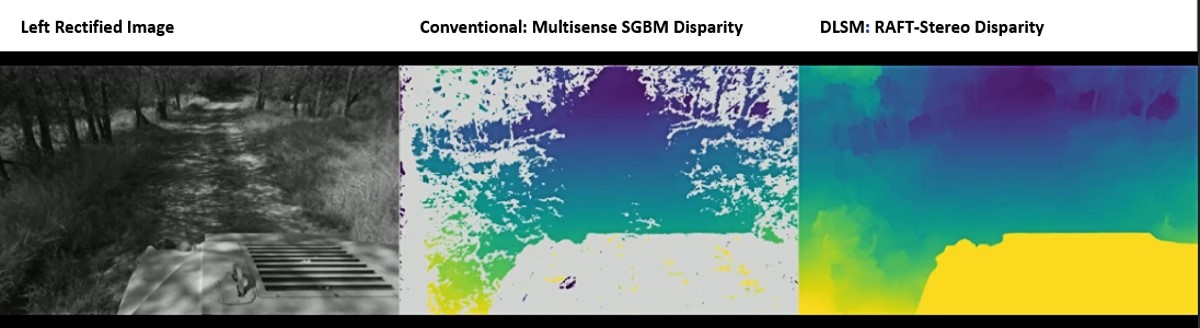
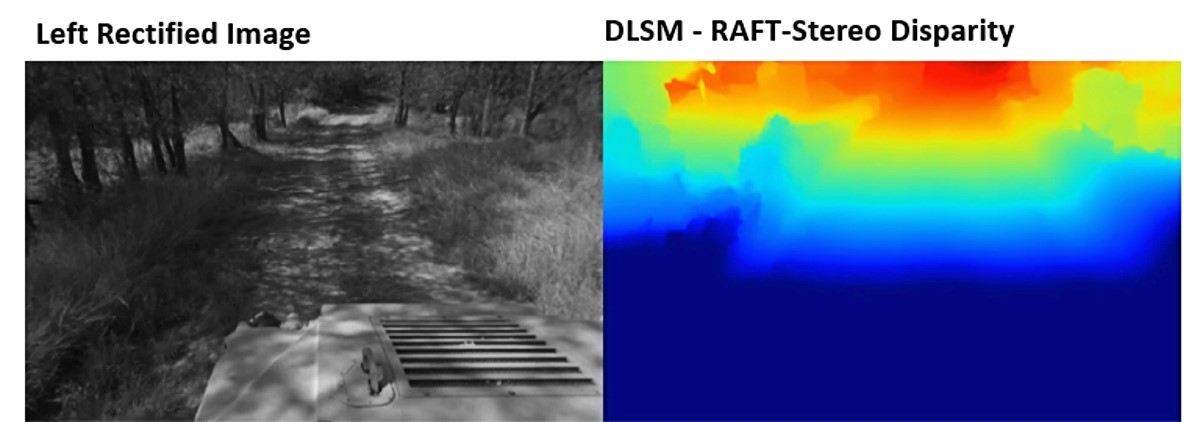
Softver koristi podatke stereo kamere za visoko precizne zadatke koji se tradicionalno izvršavaju s pomoću lidara, od lokalizacije i percepcije, do mapiranja i modeliranja svijeta. Novo razvijeni alat za stereo usklađivanje dubinskog učenja (DLSM) koristi rekurentnu neuronsku mrežu za stvaranje gustih, točnih mapa dispariteta iz stereovizije. Ove karte ističu razlike u kretanju između dviju stereo slika.
Algoritam kombinira podatke iz značajki stereo slike i očitanja iz inercijalnog mjerenja kako bi izračunao vrlo precizne lokalizacijske podatke.
SwRI sad planira integrirati VORA tehnologiju u druge autonomne sustave i testirati je na terenskoj stazi u kampusu u San Antoniju.














