I strojevi se mogu znojiti, osjećati bol, imati šesto čulo i smisao za humor
Služeći se kombinacijom kamera, senzora i algoritama znanstvenici rekreirati ljudska osjetila i stvariaju robote s poboljšanim senzornim sposobnostima

Veliki grčki mislilac Aristotel prvi je utvrdio da ljudi imaju pet osjetila i ta se univerzalna tvrdnja ponavlja sve do danas. No ne misle svi tako pa senzorski stručnjak John Henshaw sa Sveučilišta u Tulsi smatra da ih imamo devet i Aristotelovom izvornom popisu vida, sluha, mirisa, okusa i dodira dodaje još i ravnotežu, temperaturu, bol i propriocepciju, svijest o položaju i djelovanju dijelova našeg tijela. Propriocepciju obično nazivamo "šestim čulom" koje nam omogućuje da zatvorenim očima pratimo gdje se naši dijelovi tijela nalaze u prostoru. Bez njega ne bismo mogli odrediti položaj, brzinu i smjer svakog dijela te precizno kontrolirati naše pokrete.
Teoretizirati koliko je osjetila može biti zanimljivo, no znanstvenike više zanima kako ih rekreirati i stvoriti robote s poboljšanim, "ljudskijim" senzornim sposobnostima ili osjetljivije invalidske proteze. Pritom se obično služe kombinacijom kamera, senzora i algoritama koji robotima omogućuju da hodaju, hvataju predmete i izvode razne delikatne manipulacije. Posebna se pažnja pritom pridaje razvoju mekih robota jer su, barem u teoriji, prilagodljiviji, sigurniji i spretniji od konvencionalnih. No baš zato što su tako fleksibilni i elastični, u praksi ih je teško opremiti točnim propriocepcijskim i taktilnim osjetilima.
Meki roboti
Kako bi prevladali ovaj problem, MIT-ovi istraživači osmislili su GelFlex, mekani robotski prst koji koristi ugrađene kamere i metode dubinskog učenja kako bi omogućio taktilno osjetilo visoke rezolucije i svijest o položajima i pokretima. Testiran na metalnim predmetima različitih oblika, sustav se mogao pohvaliti točnošću prepoznavanja većom od 96 posto.
Kombinacijom kamera, senzora i algoritama koji će četveronožnom robotu omogućiti da izbjegne prepreke i trči po zahtjevnom terenu služe se i na Kalifornijskom sveučilištu u San Diegu. Reproduciranje šestog čula daje ovom neobičnom četveronošcu osjećaj kretanja, smjera, brzine, lokacije i tla pod nogama. Istraživači su razvili i poseban skup algoritama za spajanje podataka sa slika u stvarnom vremenu, snimljenih dubinskom kamerom na glavi robota, s podacima iz senzora na njegovim nogama.
Smisao za ravnotežu
Propriocepcija je usko povezana s ravnotežom, a tu je najdalje otišao Boston Dynamics. Njihov Atlas najnapredniji je humanoidni robot na svijetu; visok je 150 cm i ima 28 hidrauličkih zglobova za mobilnost. Pomalo podsjeća na astronauta, kamere i senzori dubine daju podatke njegovom kontrolnom sustavu, dok se svi proračuni potrebni za kontrolu, percepciju i procjenu odvijaju na njegova tri računala, što mu omogućuje da oponaša našu sposobnost održavanja ravnoteže dok se krećemo.
U srcu Atlasovog kontrolera je Model Predictive Control (MPC) koji procjenjuje moguće radnje koje robot može poduzeti odmah i u bliskoj budućnosti kako bi najbolje obavio postavljeni zadatak. Atlas koristi MPC za hodanje neprestano ažurirajući predviđanje svog budućeg stanja i koristi to predviđanje za odabir svojih radnji u stvarnom vremenu.
Test simuliranog gradilišta, prikazan u najnovijem videu, velika je novost u robotici jer pokazuje da Atlas može postaviti više referenci ponašanja jednu na drugu. To je prekretnica za Boston Dynamics koji najavljuje robota sličnog Atlasu koji će obavljati široku paletu zadataka manipulacije, podizati teške predmete, brzo ih prenositi i točno postavljati tamo gdje mu je rečeno.
Temperaturni senzori
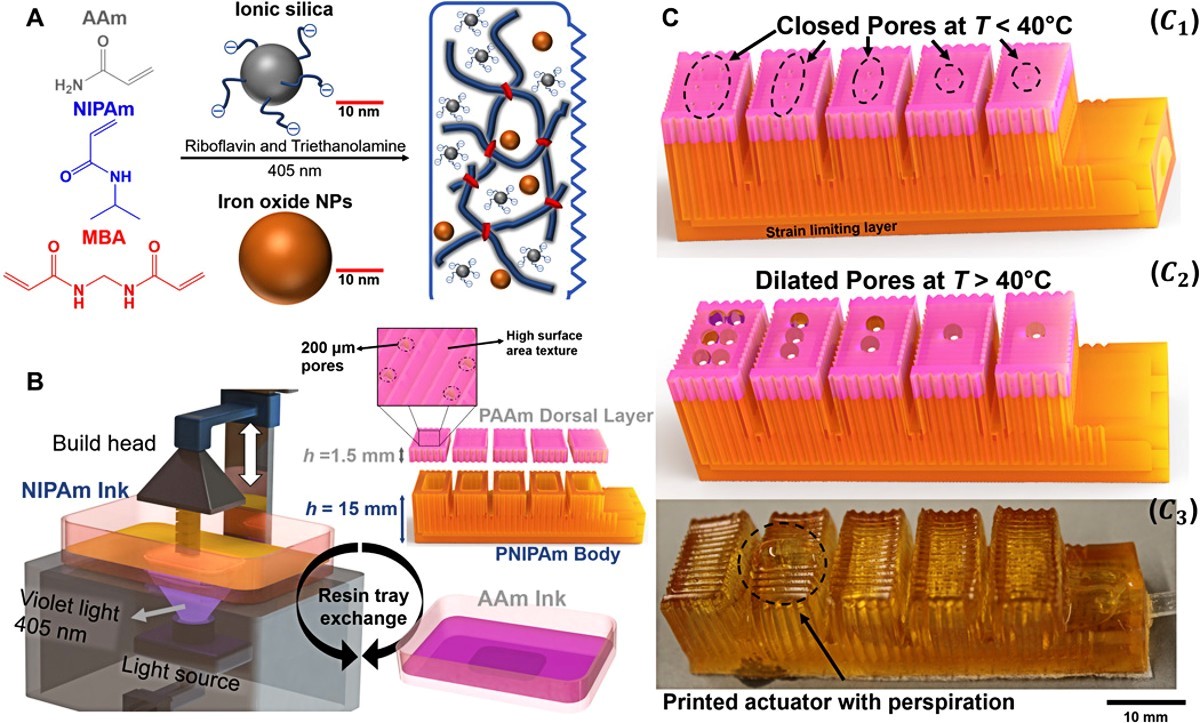
Ljudsku sposobnost da točno osjetimo temperaturu i rashladimo znojenjem, inženjeri uporno pokušavaju prenijeti na robote jer bi im takav način upravljanja toplinom mogao omogućiti da dulje vrijeme rade bez pregrijavanja, osobito na udaljenim lokacijama. Istraživači Sveučilišta Cornell poduzeli su prvi korak i stvorili meki robotski mišić, opisan u časopisu Science Robotics, koji svoju temperaturu regulira upravo "znojenjem".
Osmislili su nanopolimerne materijale za znojenje koristeći tehniku 3D ispisa zvanu multi-material stereolitography koja koristi svjetlost za stvrdnjavanje smole u unaprijed dizajnirane oblike. Pokretači poput prstiju sastavljeni su od dva hidrogel materijala koji mogu zadržati vodu i reagirati na temperaturu.
Do pojave autonomnih robota koji lutaju udaljenim lokacijama dijeli nas još nekoliko godina, a budući da bi trebali uzimati vodu kako bi se znojili, vjerojatno će i oni morati naučiti piti poput nas.
Koža osjetljiva na dodir
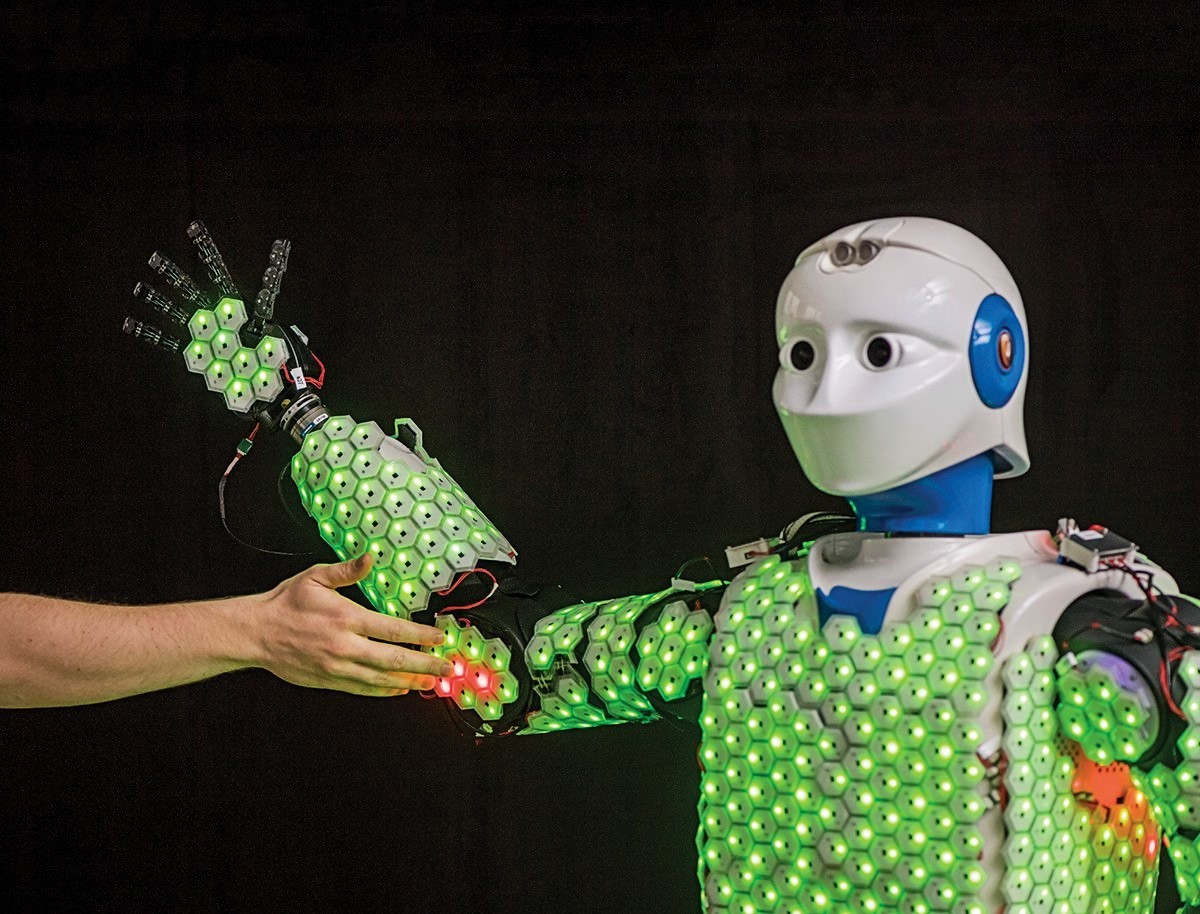
Znanstvenici već desetljećima rade na izradi umjetne kože osjetljive na dodir. Jedna široko istražena metoda je postavljanje niza kontaktnih senzora ili senzora pritiska po površini elektroničke kože koji otkrivaju kontakt s predmetom i te podatke potom šalju računalu na obradu i interpretaciju. Na Tehničkom sveučilištu u Münchenu razvili su sustav koji umjetnu kožu kombinira s kontrolnim algoritmima i tako stvorili prvi autonomnog humanoidnog robota s umjetnom kožom preko cijelog tijela.
Elektronička koža sastoji se od šesterokutnih ćelija od kojih je svaka opremljena mikroprocesorom i senzorima za otkrivanje kontakta, ubrzanja, blizine i temperature. Oni rade zajedno kako bi omogućili robotu da detaljno i osjetljivo percipira svoju okolinu. Kako bi se izbjeglo preopterećenje podacima, sustav nije dizajniran za kontinuirano praćenje stanica kože. Umjesto toga, pojedinačne ćelije prenose informacije sa svojih senzora samo kad se promijene vrijednosti.
Robot koji osjeća bol
Ovu tehniku inspiriranu ljudskim živčanim sustavom, koriste i drugi istraživači; na Sveučilištu u Glasgowu nedavno su tako izradili elektroničku kožu sposobnu za računalno učinkovit odgovor sličan sinapsi. Istraživači su ispisali mrežu od 168 sinaptičkih tranzistora napravljenih od nanožica cink-oksida izravno na površinu fleksibilne plastične površine. Sinaptički tranzistor povezali su s kožnim senzorom na dlanu ruke humanoidnog robota. Kad se dodirne senzor, on registrira promjenu svog električnog otpora. Mala promjena odgovara laganom dodiru, dok jači dodir stvara veću promjenu otpora.
U ranijim generacijama elektroničke kože, ulazni podaci slali bi se računalu na obradu, ali u ovom slučaju sklop ugrađen u kožu djeluje kao umjetna sinapsa, smanjujući ulaz u jednostavan skok napona čija frekvencija varira ovisno o razini pritiska na kožu, ubrzavajući proces reakcije. Inženjeri su koristili različitu izlaznu snagu skoka napona kako bi naučili kožu odgovarajućim reakcijama na simuliranu bol, pokrećući ruku robota da reagira. On je naučio odmaknuti se od izvora simulirane nelagode kroz proces obrade informacija koji oponaša rad ljudskog živčanog sustava.
Androidi sa smislom za humor
Programirati robota da ima dobar smisao za humor nije nimalo smiješan zadatak. Ljudi se ne mogu složiti oko toga što nešto čini smiješnim, zbog čega je učenje robota kako se smijati gotovo nemoguće. Istraživači Sveučilišta Kyoto https://www.kyoto-u.ac.jp/en poslužili su se umjetnom inteligencijom kako bi nijanse humora ugradili u androida zvanog Erica. Kad se čovjek nasmije, UI sustav reagira smijehom kao empatijskom reakcijom, a cijeli se proces temelji na tri podsustava: za otkrivanje smijeha, za odlučivanje treba li se nasmijati te za odabir vrste prikladnog smijeha.
"Empatija je jedna od važnih funkcija umjetne inteligencije", vjeruju tvorci ovog sustava. "Roboti bi trebali imati poseban karakter, a mi mislimo da to mogu pokazati svojim ponašanjem u razgovoru, gledanjem u oči, gestikulacijama, stilom govora i - smijehom."