"Tekuće" neuronske mreže znaju što rade
Određena vrsta agenta umjetne inteligencije tijekom treninga može naučiti uzročno-posljedičnu osnovu navigacijskog zadatka

Istraživači s MIT-a pokazali su da je određena vrsta neuronske mreže sposobna naučiti pravu uzročno-posljedičnu strukturu navigacijskog zadatka za koji se obučava. Budući da te mreže mogu razumjeti zadatak izravno iz vizualnih podataka, trebale bi biti učinkovitije od drugih neuronskih mreža kada se kreću u složenom okruženju, poput područja s gustim drvećem ili brzih promjena vremenskih uvjeta.
Kontinuirana prilagodba
Najnoviji rad koji će istraživači u prosincu predstaviti na Konferenciji o neuronskim sustavima za obradu neuronskih informacija (NeurIPS), mogao bi poboljšati pouzdanost agenata za strojno učenje koji obavljaju komplicirane zadatke, poput vožnje autonomnog vozila na prometnoj autocesti.
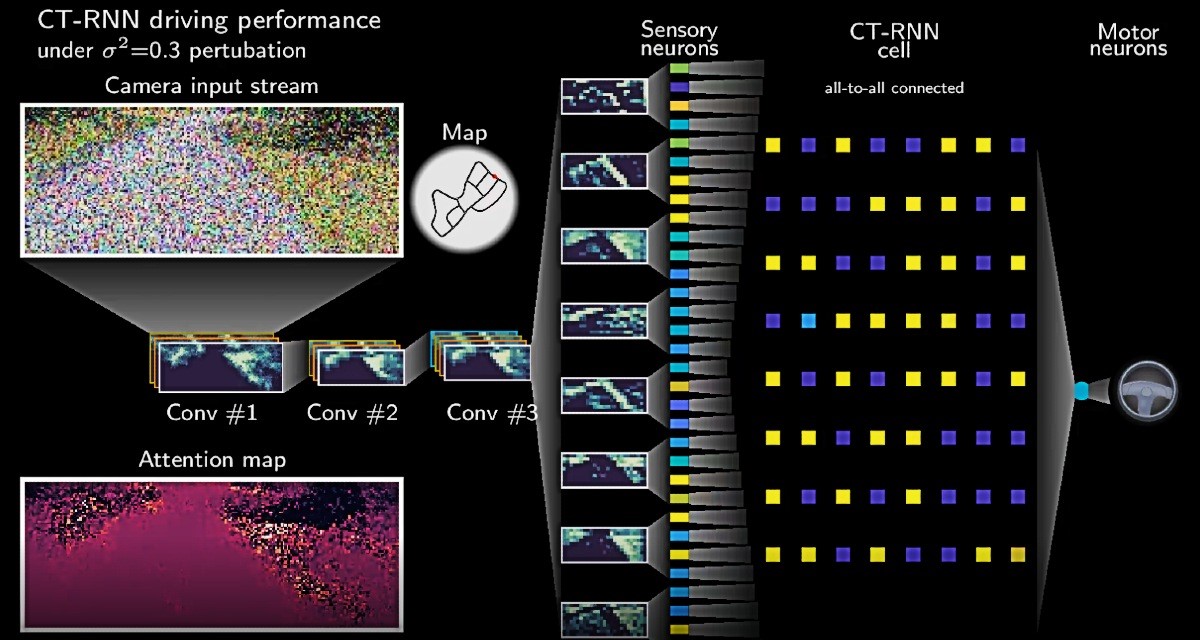
Neuralne mreže su metoda za strojno učenje u kojoj računalo uči izvršiti zadatak putem pokušaja i pogreške. A "tekuće" neuronske mreže mijenjaju svoje temeljne jednadžbe kako bi se kontinuirano prilagođavale novim ulazima.
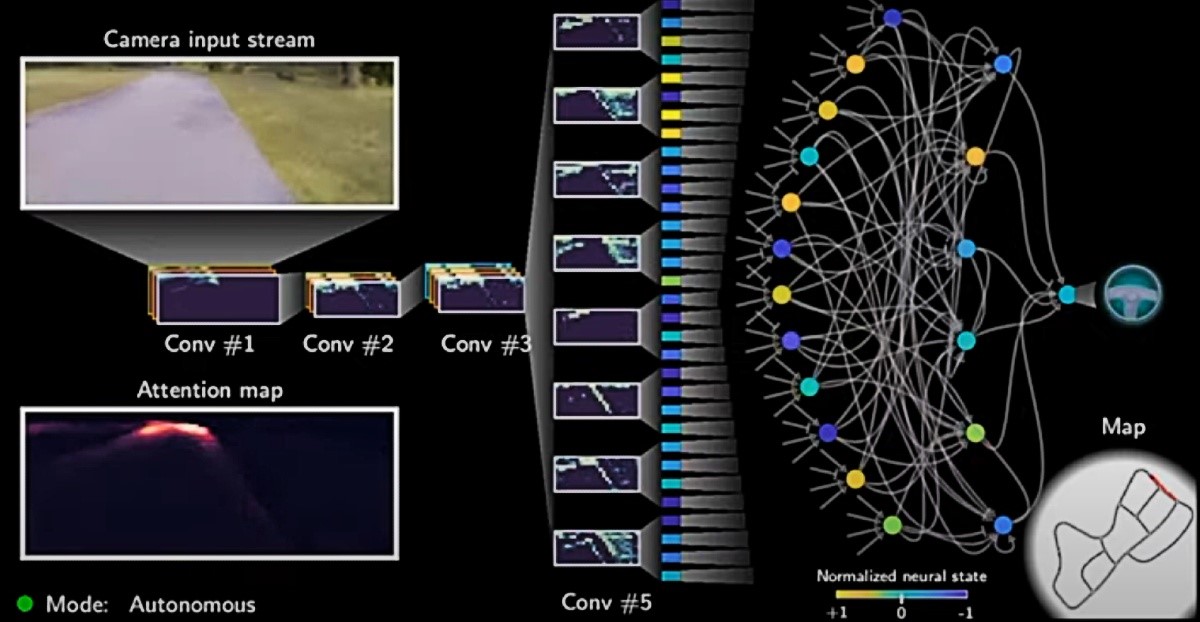
Novo istraživanje oslanja se na prethodni rad u kojem su istraživači Laboratorija za računalne znanosti i umjetnu inteligenciju (CSAIL) pokazali kako je Neural Circuit Policy (NCP), tip sustava dubokog učenja inspiriran mozgom izrađen od tekućih stanica neuronske mreže, sposoban autonomno kontrolirati samovozeće vozilo, i to s mrežom od samo 19 kontrolnih neurona.

Istraživači su primijetili da su se NCP-ovi prilikom donošenja odluka o vožnji koncentrirali na obzor i rubove ceste, onako kako bi to činili i ljudi dok voze automobil. Druge neuronske mreže nisu se uvijek fokusirale na cestu. Otkrili su i da NCP prepoznaje mijenja li se njezin rezultat određenom intervencijom, a zatim povezuje uzrok i posljedicu.
Testovi na dronovima
NCP-ove su testirali i na bespilotnim letjelicama koje su trebale putovati do ciljanog objekta, loviti pokretnu metu ili slijediti niz oznaka u različitim okruženjima, uključujući šumu sekvoje. Letjeli su i pod različitim vremenskim uvjetima, od vedrog neba, preko jake kiše, do magle.
NCP-ovi su se jednako dobro snalazili kao i druge mreže na jednostavnijim zadacima po lijepom vremenu, ali su se pokazali puno boljima u zahtjevnijim zadacima, poput jurnjave za pokretnim objektom kroz kišnu oluju.
"Jednom kada sustav nauči što bi zapravo trebao raditi, može se dobro ponašati u novim scenarijima i uvjetima okoliša koje nikada nije doživio. Ovo je veliki izazov trenutnih sustava strojnog učenja koji nisu uzročni. Ovi rezultati pokazuju kako uzročnost može proizaći iz izbora neuronske mreže", kažu istraživači koji sad žele istražiti uporabu NCP-ova u većim sustavima. Spajanje tisuća ili milijuna mreža moglo bi omogućiti rješavanje još kompliciranijih zadataka.