Jeftini robot osposobljen za savladavanje svake prepreke


Robotski sustav kojega su osmislili istraživači s CMU-a i Berkeleyja omogućuje malim, jeftinim četveronožnim robotima samostalno kretanje u složenim i zahtjevnim okruženjima
Istraživači na Fakultetu računalnih znanosti Sveučilišta Carnegie Mellon i kalifornijskom sveučilištu Berkeley dizajnirali su robotski sustav koji omogućuje jeftinom robotu s relativno malim nogama da se penje i spušta stepenicama čije su stube gotovo njegove visine. I ne samo po stubištima: može se kretati po stjenovitim, skliskim, neravnim, strmim i drugim raznoliko kompliciranim terenima, a sve to je sposoban obavljati čak i u mraku.
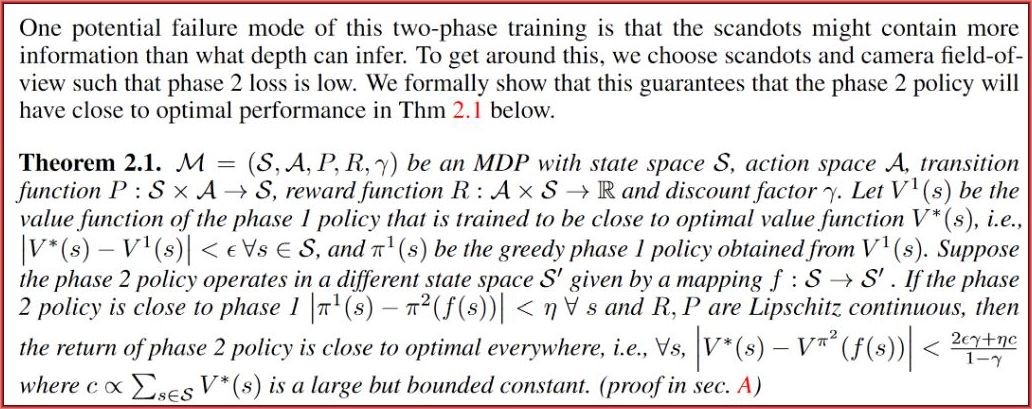
„Razvoj malih robota osposobljenih za penjanje po stepenicama i snalaženje u raznim okruženjima ključno je za razvoj kućnih robota, kao i u robota koji sudjeluju u operacijama traganja i spašavanja“, kaže Deepak Pathak, docent na Institutu za robotiku. Istraživački rad „Legged Locomotion in Challenge Terrains Using Egocentric Vision“, bit će predstavljen na skorašnjoj konferenciji o učenju robota u Aucklandu.
Sustav virtualnog učenja
Robot nazvan jednostavno "A1" testiran je na složeno konstruiranim stubištima i na padinama u javnim parkovima, preko kamenih blokova i skliskih površina. Kretao se po stepenicama zbog čije visine je penjanje po njima bilo usporedivo ljudskom preskakanju prepreka. Robot se brzo prilagođava i svladava zahtjevan teren oslanjajući se na svoj vid i ugrađeno računalo.
Istraživači su za kretanje po zahtjevnim preprekama uvježbavali robotske algoritme u računalnom simulatoru, što je omogućilo robotu da u jednom danu virtualne simulacije stekne iskustvo za koje bi mu u realnim „terenskim“ uvjetima trebalo šest godina. Simulator je motoričke vještine koje je virtualni robot naučio tijekom treninga pohranjivao u neuronsku mrežu, koju su istraživači potom kopirali u računalni program pravoga robota.
Ovakav način „virtualnog učenja“ predstavlja progresivni odmak od tradicionalnih metoda osposobljavanja robota za izvršavanje složenih motoričkih radnji i zadataka. Većina robotskih sustava namijenjenih kretanju prvo izvrši mapiranje okolnog prostora pomoću ugrađenih kamera, a potom te prostorne mape koristi kao „geografske karte“ za planiranje kretanja. Takav proces je spor i često rezultira pogreškama zbog inherentne nejasnoće, netočnosti ili pogrešne percepcije u fazi mapiranja koja utječe na naknadno planiranje i kretanje. Algoritam „mapiranje – planiranje – izvršenje“ nije prikladan za dinamičke zahtjeve vještina niske razine, kao što su hodanje ili trčanje po zahtjevnim terenima.
Novi sustav jednostavno zaobilazi faze mapiranja i planiranja i koristi kamere kao izravni vizualni input u računalnu kontrolu kretanja robota: ono što robot „vidi“, odmah određuje kako će se kretati. Čak ni obrasci pokreta nogu kod A1 nisu unaprijed programirani, nego robotski procesor samostalno, na temelju trenutačnih vizualnih podataka odlučuje kako bi se noge trebale kretati. Ova tehnika, nazvana prigodnim imenom Egocentric Vision, omogućuje da A1 brzo reagira promjene i probleme na koje nailazi tijekom kretanja po terenu i učinkovito ih rješava, doslovce „u hodu“.
Budući da nema potrebe za prethodnim složenim procesima mapiranja i planiranja, niti za treniranjem robota na poligonima za učenje kretanja, nego se kretanje rješava u realnom vremenu kroz procese strojnog učenja, izrada takvog robota je i do 25 puta jeftinija od trenutno dostupnih alternativnih modela.
Živi svijet kao inspiracija
Ovaj sustav je inspiriran biološkim sustavima: ljudi i životinje se kreću pomoću vida, a precizne korekcije kretanja temelje na feedback-informacijama iz osjeta ravnoteže i senzoričkih živaca u ekstremitetima. Tako i ovaj robot koristi vizualizaciju i povratnu informaciju iz senzora pokreta u nogama kao izravni input za izlazne naredbe motorima robotskih nogu. To omogućuje sustavu da bude vrlo robustan u stvarnom okružju: ako se posklizne na stepenicama, može korigirati svoj položaj u dijelu sekunde; može otići u potpuno nepoznato okruženje i istoga časa mu se prilagoditi.
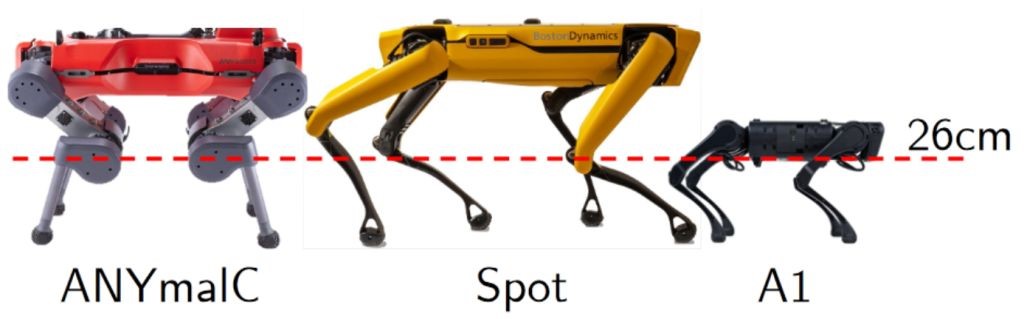
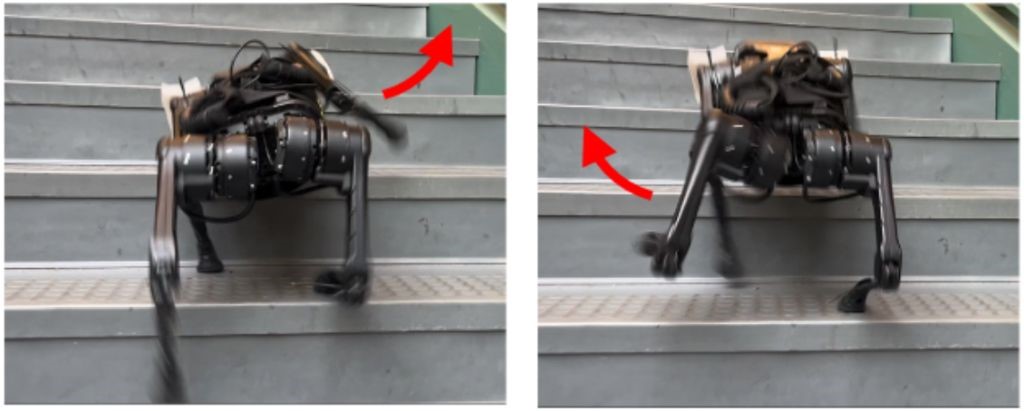
U izradi sustava za kretanje višestruko se inspiriralo prirodnim kretanjem živih bića. A1, koji je niži od 30 cm, morao je za penjanje uz stepenice ili prepreke koje su skoro njegove visine naučiti i usvojiti pokrete kakve ljudi i životinje koriste za prelaženje visokih prepreka. Primjerice, kada čovjek mora podignuti nogu da bi se popeo na visoku prepreku, ne podiže nogu ravno pred sebe, nego u stranu, koristeći specifične rotacijske pokrete (abdukcija) u zglobovima kukova. Robotski sustav kojega je osmislio Pathakov tim čini to isto: A1 koristi abdukciju kuka za svladavanje prepreka, „bacajući“ noge u stranu pri penjanju i spuštanju po stubama.
Osim abdukcijom, robotski hod je inspiriran i kretnjama stražnjih nogu četveronožnih životinja: kada se mačka kreće, koristi oči za vizualizaciju prepreka i prilagodbu hoda prednjim nogama, a njezine stražnje noge automatski izbjegavaju iste prepreke kao i prednje. Četveronožne životinje imaju svojevrstan sustav neuralnog signaliziranja koji njihovim stražnjim nogama omogućuje praćenje pokreta prednjih nogu. Sličan sustav ugrađen je i u „neuralnu mrežu“ robotskog računala u A1, što omogućuje stražnjim robotskim nogama da zapamte što je prednja kamera vidjela i shodno tome manevriraju kako bi izbjegle prepreke.
„Budući da nema mapiranja ni planiranja, naš sustav snima i pamti teren tijekom samog procesa kretanja, te istovremeno pamti i kako je pomicao prednje noge, a potom to odmah prosljeđuje na stražnje noge. Sve to se događa u realnom vremenu, brzo i besprijekorno“, kaže Ashish Kumar, doktor znanosti, student na Berkeleyju. Ugradnjom kamera s infracrvenim senzorima A1 se osposobljava i za nesmetano kretanje i u potpuno zamračenim prostorima.
Istraživanje bi moglo biti veliki (četveronožni) korak prema rješavanju postojećih izazova s kojima se suočavaju „hodajući“ roboti i ubrzati procese koji bi omogućili zadovoljavanje sve veće potražnje za dovođenjem jeftinih, spretnih, snalažljivih robota u domove ljudi.