Multirobotsko mapiranje postavlja novi "zlatni standard"
MIT-ov projekt Kimera-Multi proglašen je najboljim u konkurenciji više od 200 radova, predstavljenih na ovogodišnjoj konferenciji o robotici i automatizaciji ICRA 2023.

Zna li robot gdje se trenutno nalazi? I jednako važno: znadu li i drugi roboti kojima je okružen gdje se oni nalaze i u kakvom su odnosu jedni prema drugima? Ti su podaci izuzetno važni, a da bi se dobila pravovremena "svijest" o situaciji na velikom području robotima je potrebna sposobnost "multirobotske simultane lokalizacije i mapiranja" ili skraćeno SLAM (multirobot simultaneous localization and mapping).
Snalaženje u prostoru
A upravo je razvoj ove ključne sposobnosti za snalaženje grupe robota u prostoru, robotičarima MIT-a donijela glavnu nagradu na ovogodišnjoj međunarodnoj konferenciji o robotici i automatizaciji ICRA 2023. u Londonu. Projekt "Kimera-Multi: Robust, Distributed, Dense Metric-Semantic SLAM for Multi-Robot Systems" proglašen je najboljim u konkurenciji više od 200 radova, objavljenih prošle godine u Transactions on Robotics.
Roboti se oslanjaju na istodobnu lokalizaciju i mapiranje kako bi razumjeli gdje se nalaze u nepoznatom okruženju. Ali nepoznata okruženja velika su i potrebno je više od jednog robota da ih sve istraži. Pošaljete li cijeli tim robota, svaki od njih može malo istraživati, a zatim podijeliti naučeno s drugim robotima kako bi se temeljem tog znanja izradila mnogo veća karta kojom će se moći služiti svi.
Genereranje karata
Dakako, to je puno lakše reći nego učiniti, i zbog toga je Kimera-Multi tako koristan i važan. Riječ je o distribuiranom sustavu koji radi lokalno na gomili robota odjednom. Ako se jedan robot nađe u dometu komunikacije s drugim robotom, oni mogu dijeliti podatke karte i koristiti te podatke za izradu i poboljšanje karte koja uključuje semantičke komentare.
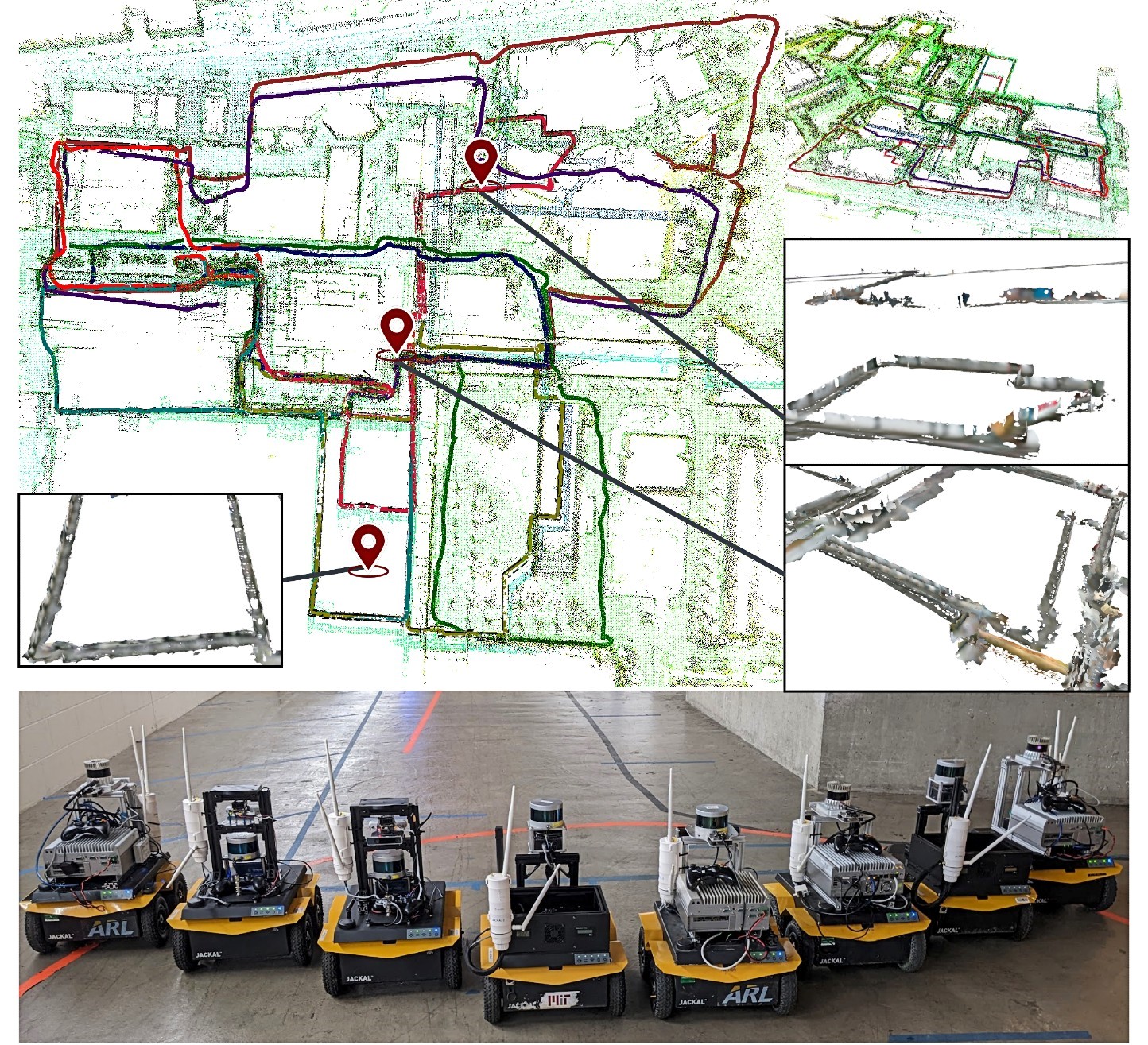
Kimera-Multi testirana je u stvarnom svijetu, a video prikazuje primjer karte koju su generirala tri robota koja su putovala ukupno više od dva kilometra. Na gore prikazanom video zapisu uočljivo je kako se točnost karte značajno poboljšava međusobnim razgovorima robota, a više detalja o projektu MIT-ovih robotičara kao i kôd dostupni su na GitHubu.
Ostale nagrade
Kimera-Multi nije jedini nagrađeni rad na ovogodišnjoij konverenciji ICRA 2023. Transactions on Robotics posebna je priznanja dodijelio i radovima "Stabilizacija komplementarnih sustava putem kontrolera svjesnih kontakta" robotičara Sveučilišta Pennsylvania i "Autonomno istraživanje spilja pomoću zračnog robota" istraživača Sveučilišta Carnegie Mellon.
Ovaj rad predstavlja metodu snimanja špilja u potpunom mraku korištenjem autonomne letjelice opremljene dubinskom kamerom za mapiranje, kamerom okrenutom prema dolje za procjenu stanja te prednjim i donjim svjetlima.
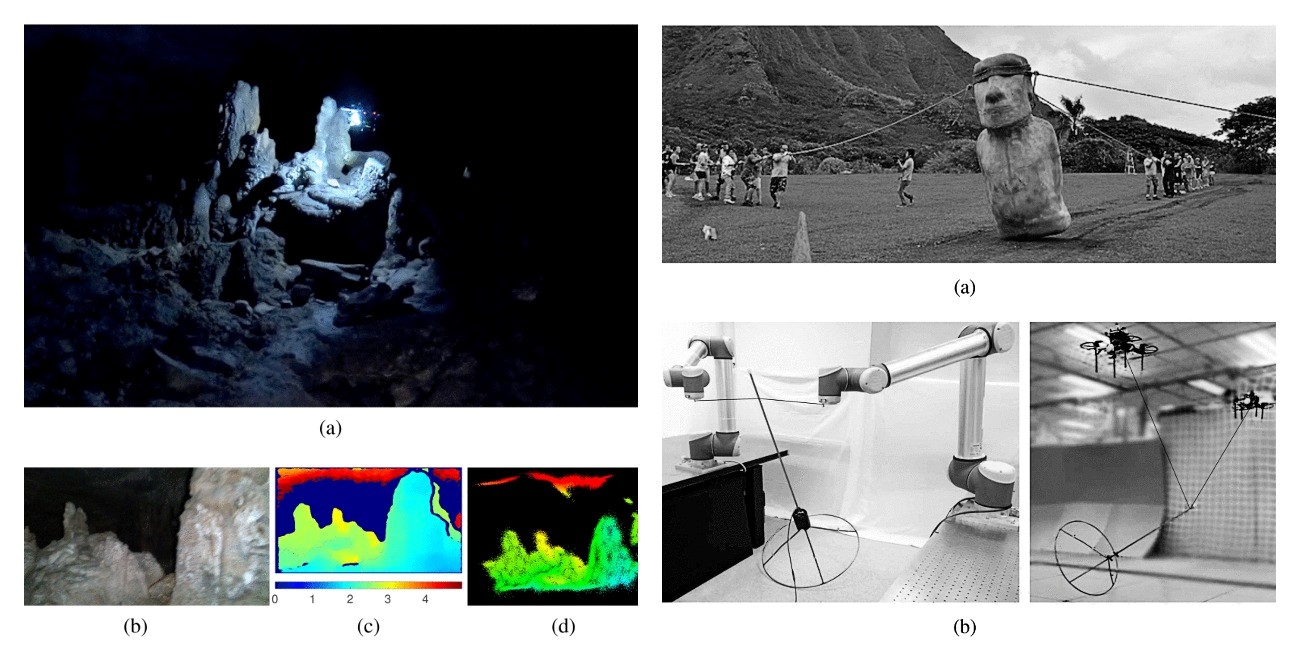
Nagrađeni su i projekti "Planiranje hvatljive manipulacije: modeliranje, algoritmi i implementacija" francuskog Laboratorija za analizu i arhitekturu sustava LAAS, "Rock-and-Walk manipulacija: Kretanje objekta dinamikom pasivnog kotrljanja i periodičnom aktivnom kontrolom" Kineskog sveučilišta u Hong Kongu te "Meki aktuatori inspirirani origamijem za opažanje podražaja i aplikacije puzajućeg robota" grupe kineskih robotičara.
























