Pristižu novi detalji vezani uz nesreću Uberovog vozila – standardni sustav zaštite bio je isključen
Prema podacima kompanije Aptiv koja oprema Volvo vozila radarima za izbjegavanje sudara, ovaj je sustav kod Ubera bio isključen na vozilu koje je sudjelovalo u prometnoj nesreći


Dok policija u Arizoni pokušava istragom doći do odgovora tko je kriv za smrt pješakinje pod kotačima samoupravljanog Uberovog Volva prošloga tjedna, a država Arizona zabranjuje testiranja dok se slučaj ne riješi, iz drugih izvora pristižu nove informacije. Najveće pitanje – ono zašto Uberov autonomni sustav, inače opremljen radarom, lidarom i kamerama, nije spazio pješakinju koja se (doduše, na nepropisan način) kreće kolnikom, i dalje je bez odgovora.
U trenutku sudara Volvo se kretao brzinom od 64 km/h i nije zakočio
U međuvremenu iz kompanije Aptiv, čija je tehnologija za izbjegavanje sudara dio standardne ponude Volva, kažu kako njih u ovu priču ne treba uplitati. Prema njihovim navodima, naime, Uber je u testnim vozilima isključio Aptivove kamere i radare, te tako ova kompanija nema ništa s fatalnom nesrećom.
Sličan potez, ograđivanje od Uberove nesreće i zatajivanja automatike, povukli su još neki konkurenti. Prvo je šef Googleovog Wayma, John Krafcik, izjavio kako bi njihov sustav prepoznao pješakinju koja gura bicikl preko više kolničkih traka.
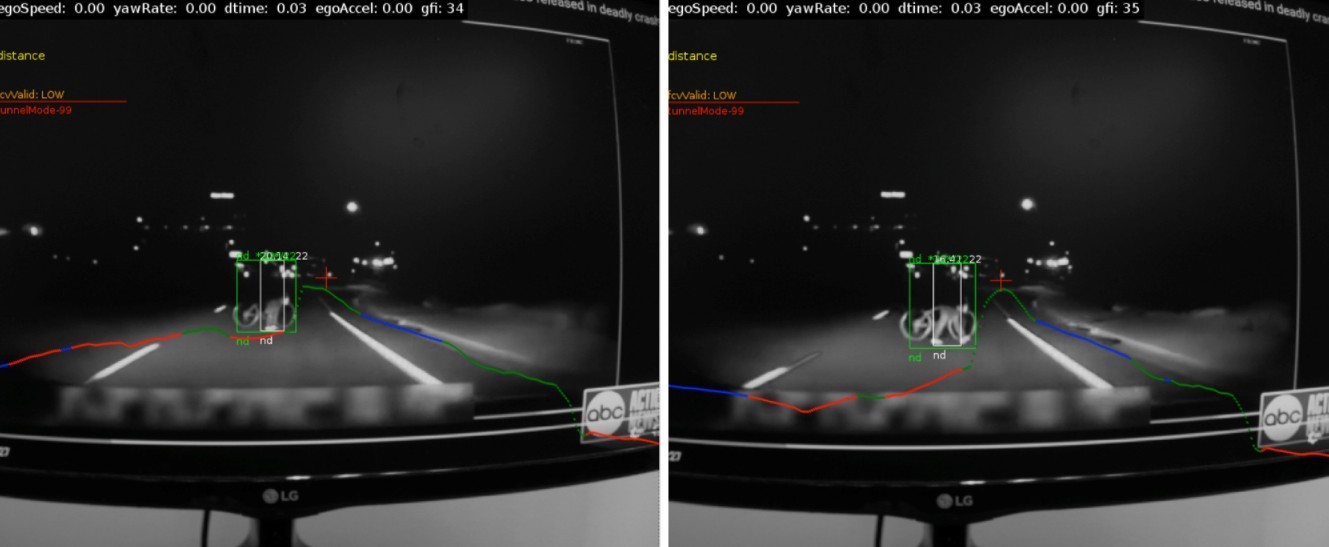
Nakon toga je i iz Intelovog Mobileyea, čije čipove Aptiv koristi, priopćeno kako su oni svoj sustav testirali na snimci nesreće iz Tempea. Isključivo na temelju videa loše kvalitete Mobileyevi su senzori "vidjeli" nesretnu pješakinju sekundu prije nego je automobil na nju naletio.
I iz kompanije Velodyne Lidar, čije sustave Uber ponekad koristi, kažu kako su uvjereni da je njihov laserski radar morao registrirati pješakinju, ali da on ne može donijeti odluku o kočenju ili izbjegavanju prepreke.
























