Novi algoritam robotima ubrzava planiranje pokreta do 100 puta
Nova generacija robota zahvaljujući inovativnom algoritmu s MIT-a i Nvidije može u sekundi pronaći rješenje za zadatke koji su dosad zahtijevali sate računanja

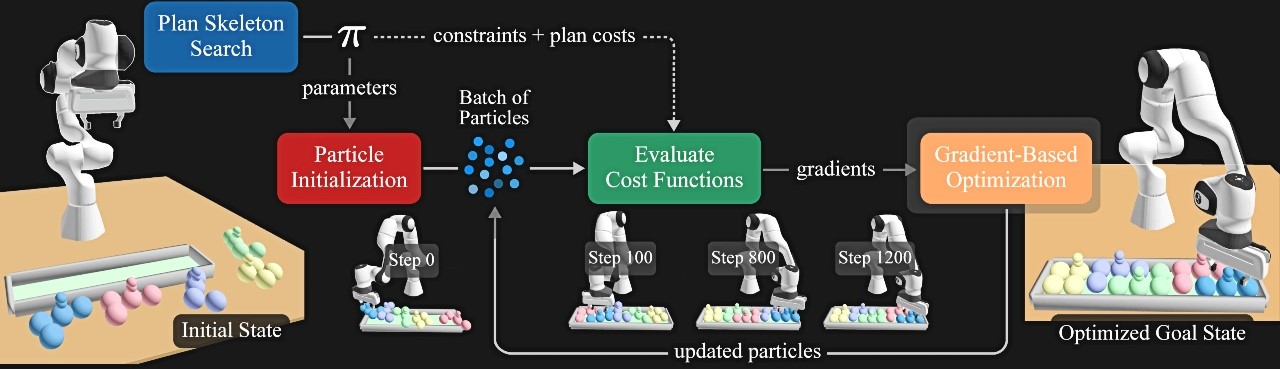
Temelj inovacije je algoritam cuTAMP koji koristi snagu grafičkih procesora kako bi istovremeno analizirao tisuće mogućih rješenja za zadani problem. Umjesto da roboti postupno isprobavaju jednu po jednu opciju, cuTAMP im omogućuje paralelno “razmišljanje unaprijed”, što drastično ubrzava proces odlučivanja – zadaci koji su prije zahtijevali sate sada se rješavaju u sekundi.

Ovaj napredak temelji se na kombinaciji optimizacije uz pomoć derivacija (differentiable optimization) i masovne paralelizacije, gdje se neuronske mreže koriste za prilagodbu parametara u stvarnom vremenu. Rezultat su roboti koji mogu planirati složene manipulacije, izbjegavati sudare u skučenim prostorima i koristiti alate za zadatke izvan svog neposrednog dosega.
U laboratorijskim testovima, roboti su uspješno pakirali predmete, pritiskali tipke uz pomoć štapića i premještali prepreke kako bi dovršili zadane konstrukcije. Sljedeći korak bit će, kažu, integracija velikih jezičnih modela koji će robotima omogućiti da razumiju i izvršavaju verbalne upute korisnika.
























