Spretne robotske ruke s lakoćom manipuliraju tisućama objekata
Istraživači MIT-ovog Laboratorija za računalnu znanost i umjetnu inteligenciju osmislili su sustav koji može preusmjeriti više od 2000 različitih objekata, s robotskom rukom okrenutom gore ili dolje

Strojevi danas mogu učiniti puno više od pukog podizanja i spuštanja predmeta, no činjenica je kako je godinu dana stara beba još uvijek spretnija od robota. OpenAI, tvrtka koja se bavi razvojem umjetne inteligencije isprobala je moć sustava Dactyl na svojoj humanoidnoj robotskoj ruci, a DeepMind je izradio RGB-Stacking sustav koji robota uči kako zgrabiti i složiti predmete.
Eksperiment antropomorfnom rukom
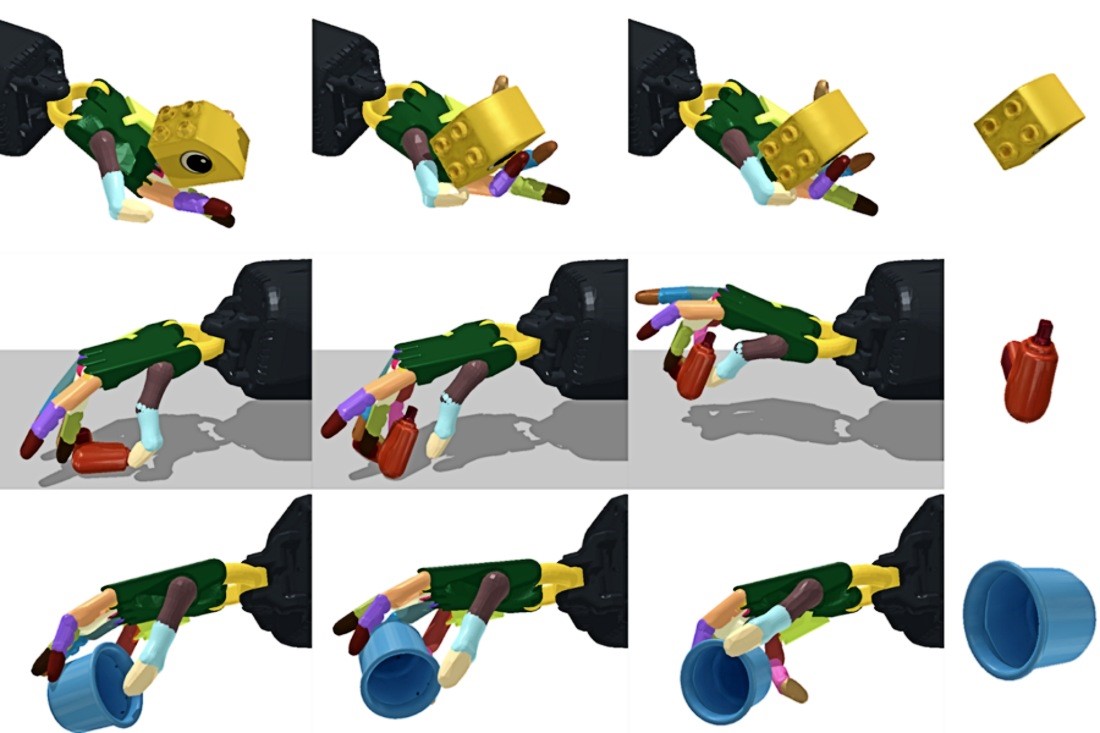
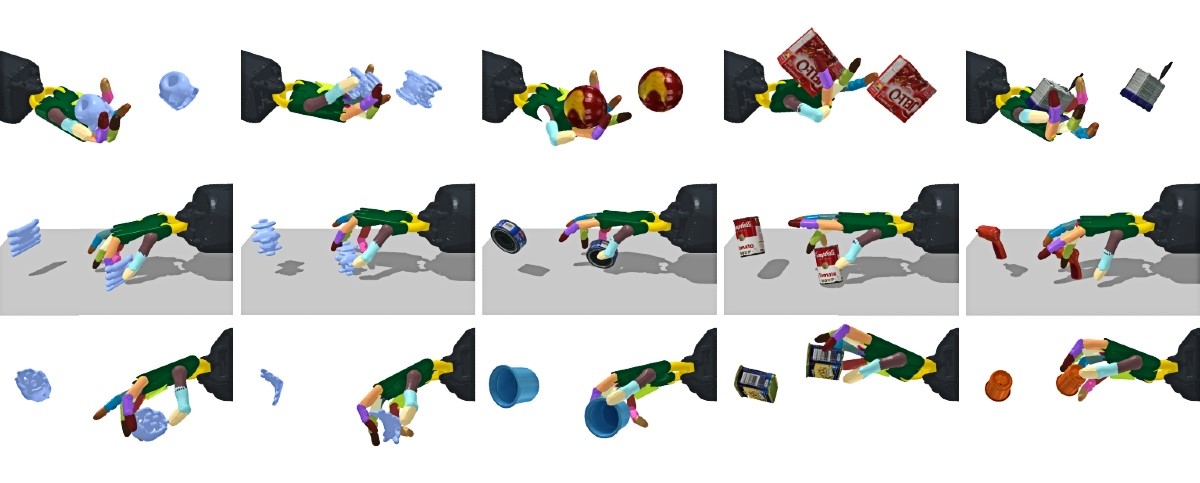
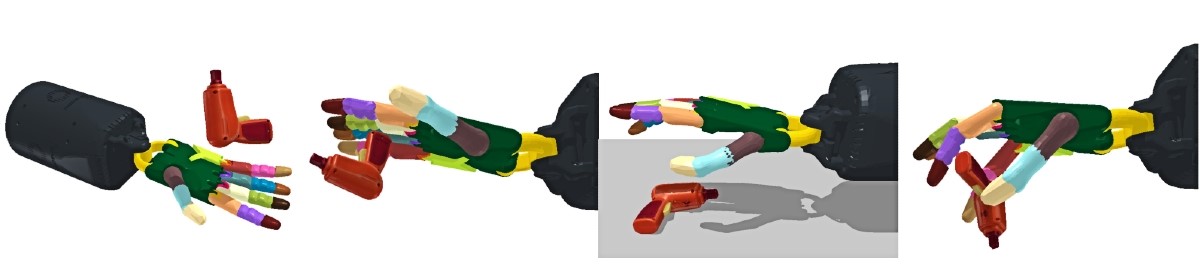
Istraživači Laboratorija za računalnu znanost i umjetnu inteligenciju MIT-a (CSAIL), osmislili su pak sustav koji može preusmjeriti više od 2000 različitih objekata, s robotskom rukom okrenutom prema gore ili dolje. Ova sposobnost manipuliranja bilo čime, šalicama, konzervama, kutijama i predmetima neobičnih oblika, mogla bi pomoći ruci da brzo uhvati i postavi predmete na određene načine i mjesta.

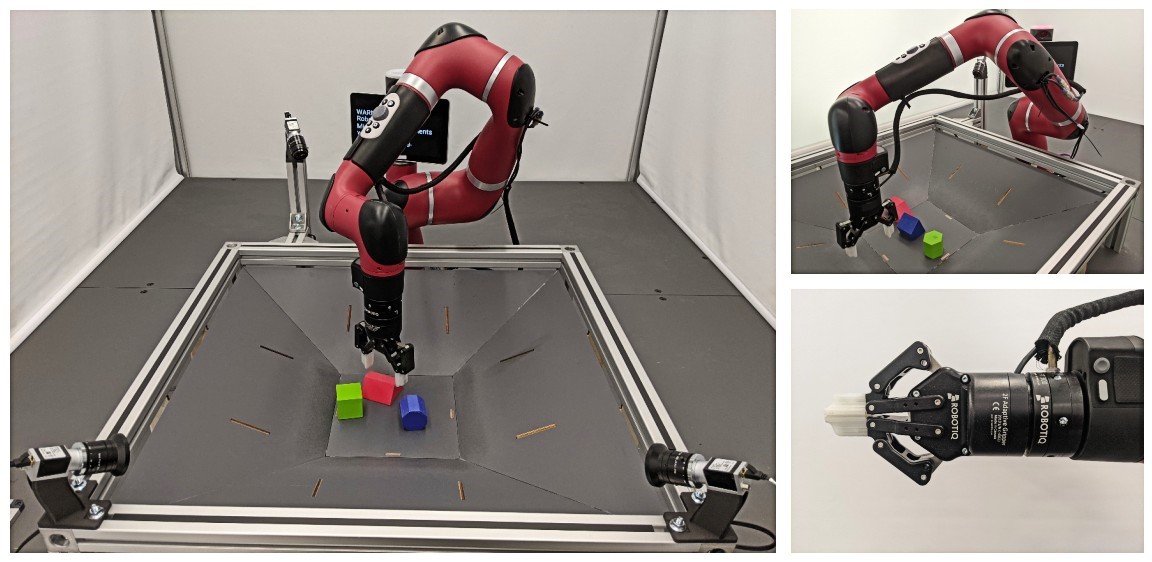
U eksperimentu je korištena simulirana, antropomorfna ruka pomoću koje je dokazano kako bi se sustav u budućnosti mogao prenijeti na prave robote.
"U industriji se najčešće koristi hvataljka s paralelnom čeljusti, djelomično zbog jednostavne kontrole, ali ona fizički nije u stanju nositi se s mnogim alatima koje vidimo u svakodnevnom životu”, kaže Tao Chen, član MIT-ovog Improbable AI Laba i vodeći istraživač na projektu, predstavljenom na netom završenoj Konferenciji o učenju robota (CoRL) u Londonu.

"Čak je i korištenje kliješta teško jer ne može spretno pomicati jednu ručku naprijed-natrag. Naš sustav omogućit će ruci s više prstiju da spretno manipulira takvim alatima, što otvara novo područje za primjenu robotike."
Ova vrsta preorijentacije objekata "u ruci" bila je izazovan problem u robotici, zbog velikog broja motora kojima se treba upravljati i česte promjene kontakta između prstiju i predmeta. Problem postaje još teži kada je ruka okrenuta prema dolje jer robot mora manipulirati objektom i pritom zaobići gravitaciju.
Jednostavan pristup
Istraživači su otkrili da se ovaj složeni problem može riješiti jednostavnim pristupom. Koristili su algoritam učenja bez modela (što znači da sustav mora shvatiti funkcije vrijednosti iz interakcije s okolinom) s dubokim učenjem i nečim što se naziva metodom obuke "učitelj-učenik".
Da bi to funkcioniralo, mreža "učitelja" je obučena na informacijama o objektu i robotu koje su lako dostupne u simulaciji, ali ne i u stvarnom svijetu, kao što je lokacija vrhova prstiju ili brzina objekta. Kako bi se osiguralo da roboti mogu raditi izvan simulacije, znanje "učitelja" se destilira u opažanja koja se mogu steći u stvarnom svijetu, kao što su slike dubine snimljene kamerama, poza predmeta i položaji zglobova robota.
Koristili su i "nastavni plan i program gravitacije", u kojem robot prvo uči vještinu u okruženju nulte gravitacije, a zatim polako prilagođava kontroler normalnim uvjetima gravitacije, što je, kada se stvari odvijaju ovim tempom, stvarno poboljšalo ukupnu izvedbu.
Mozak robota
Iako je naizgled kontraintuitivno, jedan kontroler, mozak robota, mogao je preusmjeriti veliki broj objekata koje nikada prije nije vidio, i bez znanja o obliku. To sugerira da vizualna percepcija i nije toliko važna za manipulaciju, da bi i jednostavnije strategije perceptivne obrade mogle bi biti dovoljne.
Mnogi mali predmeti kružnog oblika - jabuke, teniske loptice, klikeri - imali su skoro 100 posto uspjeha s rukom okrenutom gore-dolje, dok su najnižu stopu uspjeha, otprilike tek 30 posto, imale manipulacije složenijih predmeta - žlica, odvijača, škara... Istraživači vjeruju da bi obučavanje modela na temelju oblika objekata moglo dodatno poboljšati performanse.