Robotska glista u avanturi otkrivanja novih svjetova
Nerijetko smo svjedoci kako znanstvenici, tehnolozi i inženjeri, u nedostatku učinkovitog i racionalnog rješenja za problem na kojega naiđu, posegnu za najučinkovitijim rješavateljem problema u povijesti: za prirodom.


Evolucija možda jeste spora, pa joj za neka rješenja trebaju milijuni godina, ali joj se mora priznati da se naposlijetku uspijeva nositi i s najsloženijim problemima. Recimo, jedan od onih koje je atraktivno riješila na mnogo različitih načina je problem kretanja: ptice uspješno lete zrakom, vodene životinje plivaju, a kopnene trče ili hodaju. Isto tako, a opet drukčije, evolucijske sile prirode su i za kišne gliste pronašle specifičan način kretanja unutar ekološkog okoliša u kojem se nalaze: one su prilagođene kretanju kroz tlo, što im omogućuje njihova anatomska građa, njihovo segmentirano tijelo. Kišna glista ima između 100 i 150 segmenata, a za kretanje posjeduju i koriste dvije vrste mišića: kružne i uzdužne. Mišići i segmenti omogućuju im kretanje prema naprijed, a sićušni dodaci nalik na čekinje (koji se nazivaju četkice) pomažu glistama da se taj smjer i održavaju, sprječavajući ih da skliznu unatrag.

Fleksibilnost svojih tijela gliste koriste za kretanje uporabom peristaltike, valovitih pokreta koji se usklađeno kreću kroz segmente njihovih crvolikih tijela. Peristaltika je fiziološki pojam koji tumači način mišićnog usklađenog pokretanja raznih izduženih i cjevastih anatomskih strukura; ljudi, primjerice, pomoću peristaltike gutaju hranu: akt gutanja je okidač za pokretanje vala mišićne kontrakcije koji putuje niz naš jednjak i gura hranu u naš želudac. Peristaltika jednjaka i ostatka probavne cijevi je tako skladno koreografirana da će tekućina i hrana koju progutamo stići iz usta u želudac čak i ako pritom visimo naopako ili dubimo na glavi.
Stoga ne čudi znatiželja inženjera znanstvenika i pitanje koje sami sebi postavljaju: možemo li funkcionalna načela peristaltičkih mišićnih pokreta kopirati kako bismo ih iskoristili u druge svrhe, na primjer za istraživanje drugih planeta? I zaista nije rrebalo proteći puno vremena prije nego je ekipa znanstvenika na talijanskom Institutu za tehnologiju (Istituto Italiano di Tecnologia, ITT) krenula osmišljavati i izrađivati robota koji oponaša kišne gliste kako bi svojom sposobnošću kretanja ispod površine tla pomogao u istraživanju drugih svjetova.
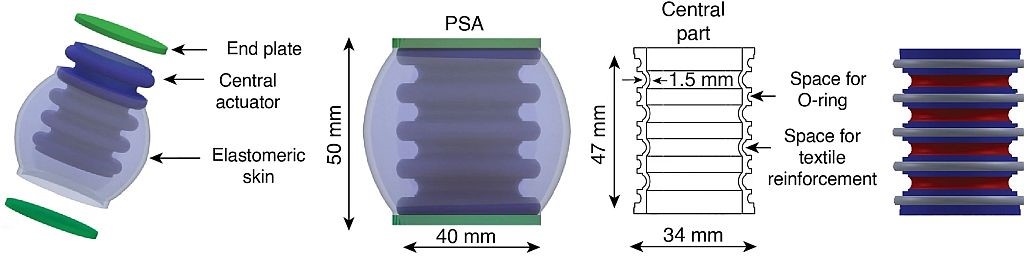
Robot je segmentirane građe, baš poput kišne gliste, segmenti se nazivaju peristaltički meki pokretači (peristaltic soft actuators, PSA), a za širenje i skupljanje segmenata koji izvode pokrete gmizanja koristi se stlačeni zrak.
Crvo-bot s hidrostatskim kosturom
Laboratorij Bioinspired Soft Robotics pri ITT-u stvorio je „crvo-bota“ kao dio nastojanja laboratorija da razvije robotska rješenja koja će omogućiti „rad u nestrukturiranim okruženjima“, kako se navodi na web stranici laboratorija i dodaje: „Ovi će roboti moći na siguran način komunicirati sa živim bićima i zamijeniti ljude u izazovnim uvjetima.“
Glavni istraživač u laboratoriju Bioinspired Soft Robotics je Barbara Mazzolai, koja je i koautorica znanstvenog rada koji je ITT-tim predstavio svojeg „crvo-bota“. Rad je naslovljen „Modularni mekani robot oblika gliste namijenjen kretanju na različitim terenima“, a glavni autor je Riddhi Das, postdoktorski istraživač na ITT-u. Rad je prije mjesec dana objavljen u časopisu Nature Scientific Reports.
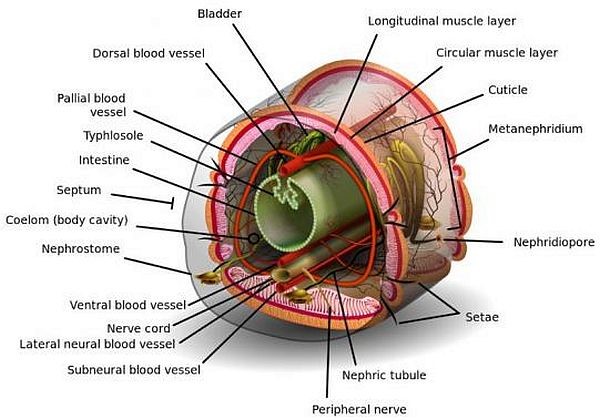
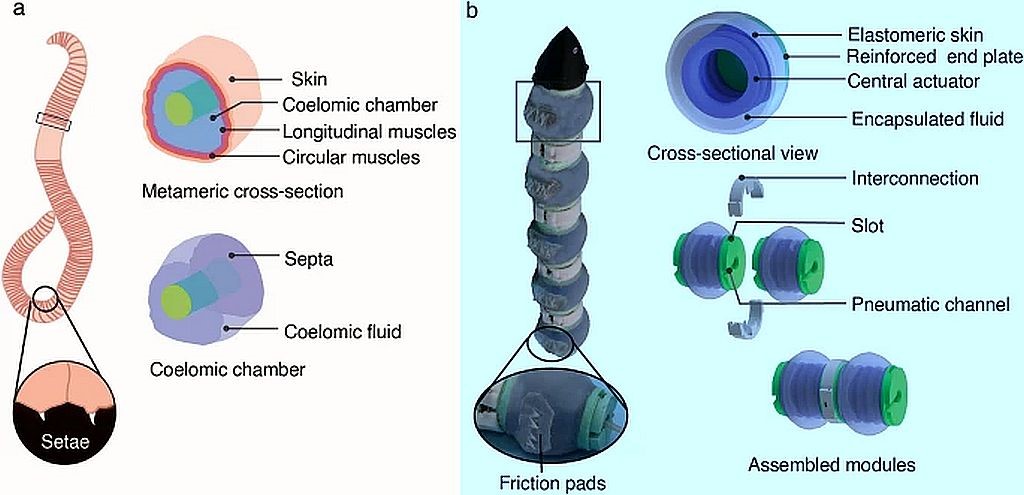
A pogledu mehanike kretanja, crvo-bot je skoro pa doslovna kopija svojeg živućeg originala, kišne gliste: segmenti tijela gliste nazivaju se metamere i sadrže tjelesnu tekućinu koja kontrolira njihov unutarnji tlak. Taj tlak omogućuje glisti da izvodi „neovisne, lokalizirane i promjenjive obrasce kretanja“, kako se navodi u priopćenju za javnost. Količina tekućine u svakom segmentu se ne mijenja; segment mijenja svoj oblik ovisno o tome kako promjene tlaka djeluju na raspored tekućine. Taj primjer korištenja hidrostatske fizike u fiziologiji kretanja u kojem tlak tekućine mijenja oblik mekanog, fleksibilnog kostura nije ekskluzivan samo za kišne gliste: u prirodi se naziva hidrostatski kostur, a imaju ga i meduze i morske anemone.
ITT tim je razradio mehanizam koji oponašanja promjenu tlaka u metamerama korištenjem zraka umjesto tekućine. PSA-segment njihovog crvo-bota izdužuje se kada se u njega upumpa zrak, a skuplja kada se zrak ispušta. Crvo-bot u sadašnjoj verziji ima pet PSA-ova, ukupno je dugačak 45 cm i težak 605 grama.
Tijekom testiranja kretanja iskušavana je funkcionalnost „zračne peristaltike“ u dva različita modaliteta: sa i bez malih pasivnih frikcionih jastučića koji oponašaju četkice kišne gliste. Na jednostavnoj ravnoj površini, njihova frikcija (trenje) pomaže crvo-botu da se kreće mnogo učinkovitije. Također su ga testirali i na različitim sipkim, zrnatim i pjeskastim površinama na različitim dubinama, sa i bez frikcionih jastučića.
Crv-bot je tek prototip koji istraživačima omogućuje da detaljnije shvate biološke osnove lokomocije (kretanja). Ipak u pogledu budućnosti ove vrste bio-nadahnutog kretanja su vrlo optimistični.
Ovo nije prvi robot inspiriran glistama i sličnim organizmima. Ideja postoji već godinama. U 2012. japanski tim razvio je robotski prototip koji osim kretanja i kopa tunele. Imao je dva ključna dijela: pogonsku jedinicu straga i jedinicu za iskopavanje sprijeda. Jedinica za iskopavanje stvarala je tunelirani prostor u kojega se robot može uvlačiti. Nakon realizacije metode peristaltičkog kretanja crvo-bota, iduća ideja je spojiti takav način pogona i kretanja s jedinicom za iskopavanje, te izraditi robota sposobnog da buši tunele u nepristupačnim područjima, te u njima putem posebno osmišljenih roboričkih mikroalatki i senzora prikuplja uzorke i vrši mjerenja. Primjerice, na Marsu, na kojem već imamo rovere i pomoćne helikopterske dronove.
Ako se postavlja pitanje bi li roboti za probijanje tunela jednog dana mogli otputovati na Mars i tamo proširiti naše istraživačke napore, odgovor je poznat: takvi roboti su već na Marsu. Sustav nazvan InSight (Interior Exploration using Seismic Investigations, Geodesy and Heat Transport) je bio zajednički NASA-in i DLR-ov projekt, čiji zadatak je bio istražiti unutrašnjost Marsa. Cijela misija je završila u prosincu 2022. nakon što je ispunila neke od svojih ciljeva, ali dio sustava za analizu topline i fizičkih svojstava (nazvan HP3, s nadimkom Krtica) nije bio uspješan.
Zadatak Krtice bio je prodrijeti dublje u Marsov regolit, površinski mrvljeno-sedimentni sloj tla, te nakon dosega do planirane dubine izvršiti mjerenja protoka topline iz unutrašnjosti Crvenog planeta prema površini pomoću ugrađenih toplinskih senzora. Ipak, Krtica svojim udarnim čekićima nije uspjela prodrijeti kroz površni sloj tla i načiniti tunel u dublje razine, jer su tvrdoća i konzistencija regolita bili veći od očekivanih, za što dizajneri misije nisu dovoljno pripremili HP3.
Ekipa istraživača s ITT-a vjeruje da bi dobro dizajnirani robot za kopanje tunela temeljen na biološkim osnovama kišne gliste možda prošao tamo gdje HP3-Krtica nije uspjela. Lender InSight bio je dobro zamišljena ideja pomoću koje bismo dobili korisne podatke o Marsovoj geologiji. Nažalost, Krtica HP3 nije uspjela, ali bi neka vrsta dodatnog trenja vanjskih rubova crvo-bota mogla bi napraviti razliku: da su nekakve frikcijske četkice mogle bolje zahvatiti tlo i pojačati snagu udarnih pokreta Krtice, taj bi uređaj možda i uspio u svom zadatku.
Tko zna? Možda će biti pokrenut InSight 2 koji će se pobrinuti za nedovršeni posao. Ako ga bude, mogli bismo vidjeti kako kroz površinu Marsa prodire potpuno drugačiji instrument, onaj koji se temelji na moćnom robotu-glisti.