Dronovi protiv vjetra - rješenje je neuronska mreža
Da bi bila istinska korisna, autonomna leteća vozila morat će naučiti navigirati u stvarnim vremenskim uvjetima i uvjetima vjetra

Dronovi trenutačno lete u kontroliranim uvjetima, bez vjetra, ili njima upravljaju ljudi pomoću daljinskih upravljača. Naučeni su letjeti u formaciji na otvorenom nebu, ali ti se letovi obično izvode u idealnim uvjetima i okolnostima. Međutim, kako bi samostalno obavljali nužne, ali svakodnevne zadatke, poput dostave paketa ili zračnog prijevoza ozlijeđenih vozača iz prometne nesreće, dronovi se moraju moći prilagoditi vjetru u stvarnom vremenu.
Metoda dubokog učenja
Inženjeri Caltecha razvili su Neural-Fly, metodu dubokog učenja koja može pomoći dronovima da se nose s novim i nepoznatim uvjetima vjetra u stvarnom vremenu ažuriranjem nekoliko ključnih parametara.
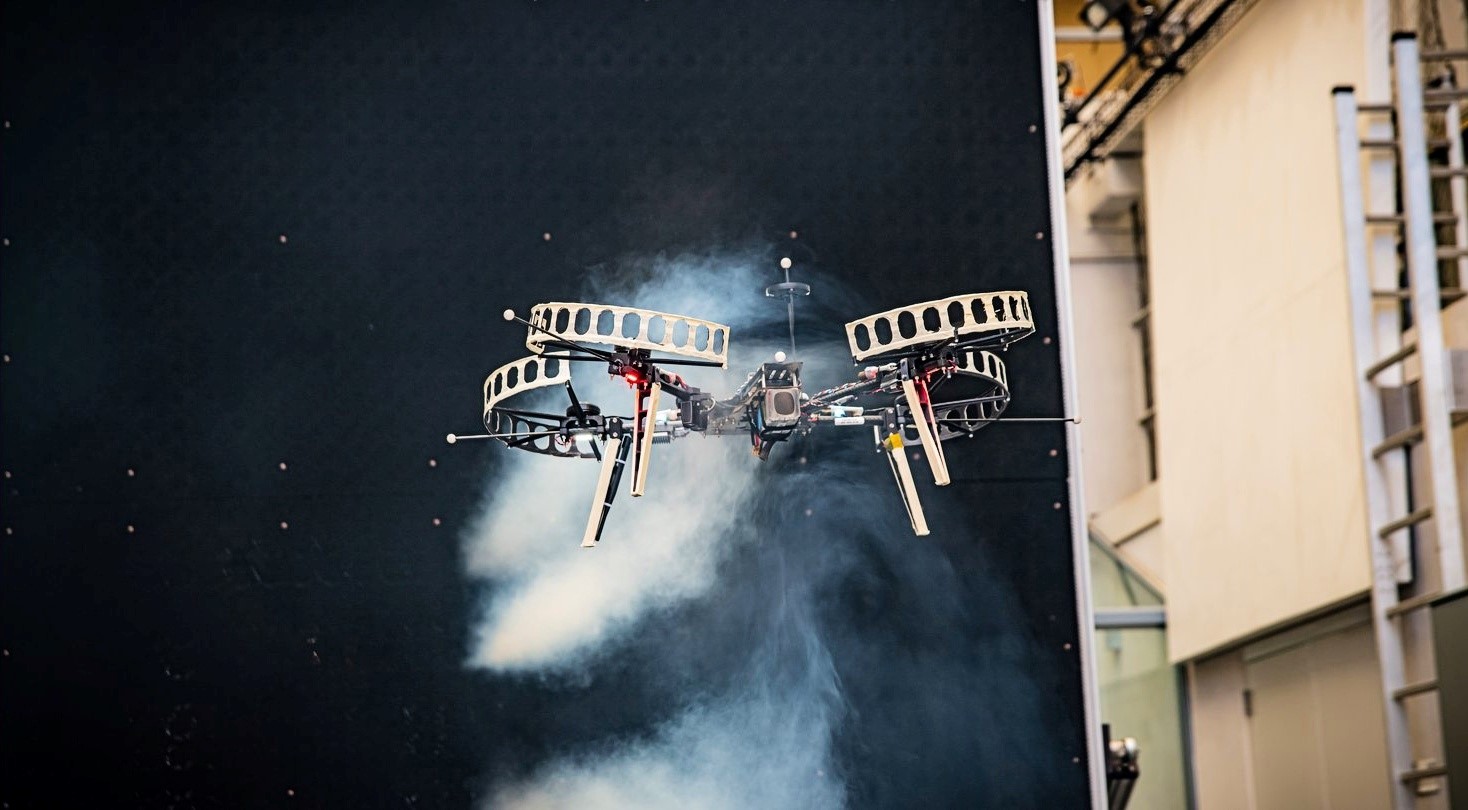
Metoda je opisana u studiji koju objavljuje Science Robotics i testirana u Caltechovom Centru za autonomne sustave i tehnologije (CAST), gdje je podvrgnut utjecajima više od 1200 malih kompjuterski kontroliranih ventilatora.
"Problem je u tome što se izravan i specifičan učinak različitih uvjeta vjetra na dinamiku, performanse i stabilnost zrakoplova ne može točno okarakterizirati kao jednostavan matematički model", kažu istraživači.
Umjesto da kvalificiraju i kvantificiraju svaki učinak turbulentnih i nepredvidivih uvjeta vjetra u zračnom prometu, oni su koristili kombinirani pristup dubokog učenja i prilagodljive kontrole koji letjelici omogućuje da uči iz prethodnih iskustava i u hodu se prilagođava novim uvjetima.
Strategija razdvajanja
Neural-Fly koristi takozvanu strategiju razdvajanja, kroz koju se samo nekoliko parametara neuronske mreže mora ažurirati u stvarnom vremenu. To se postiže novim algoritmom meta-učenja, koji unaprijed trenira neuronsku mrežu tako da se ažuriraju samo ključni parametri.

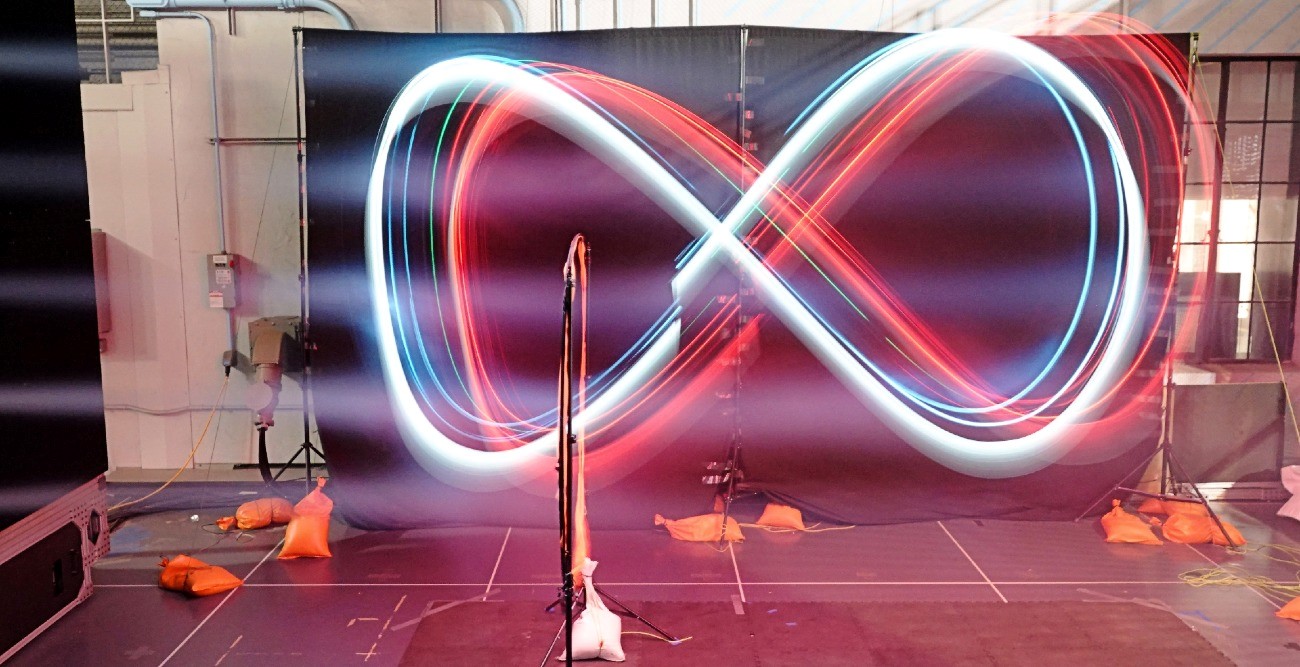
Nakon što dobiju podatke o letenju od samo 12 minuta, autonomni dronovi opremljeni Neural-Flyjem uče kako reagirati na jak vjetar kako bi značajno poboljšali performanse.
Stopa pogreške je 2,5 do četiri puta manja u usporedbi s dronovima opremljenim sličnim adaptivnim algoritmima upravljanja koji identificiraju i reagiraju na aerodinamičke učinke, ali bez dubokih neuronskih mreža.
Reagiranje u hodu
Neural-Fly se temelji na ranijim sustavima Neural-Lander i Neural-Swarm. Neural-Lander je također koristio metodu dubokog učenja kako bi pratio položaj i brzinu drona pri slijetanju te modificirao njegovu putanju slijetanja i brzinu rotora kako bi kompenzirao povratno ispiranje rotora od tla i postigao najglađe moguće slijetanje; Neural-Swarm je naučio dronove da lete autonomno u neposrednoj blizini drugih dronova.
Neural-Fly uči u stvarnom vremenu pa na promjene vjetra može reagirati u hodu i ne zahtijeva naknadno podešavanje. Uz to, podaci o letu prikupljeni jednim dronom mogu prenijeti na drugi, stvarajući bazu znanja za autonomne letjelice.














