Napredni algoritam sprečava sudare dronova u zraku
Sustav za planiranje putanje omogućuje dronovima koji rade zajedno u istom zračnom prostoru da uvijek izaberu sigurnu putanju


Kad više dronova radi zajedno u istom zračnom prostoru i, na primjer prskaju pesticid iznad polja kukuruza, uvijek postoji rizik da će zabiti jedan u drugog. Kako bi pomogli u izbjegavanju ovih skupih nesreća, istraživači MIT-a još su 2020. predstavili sustav nazvan MADER.
Dorađeni sustav
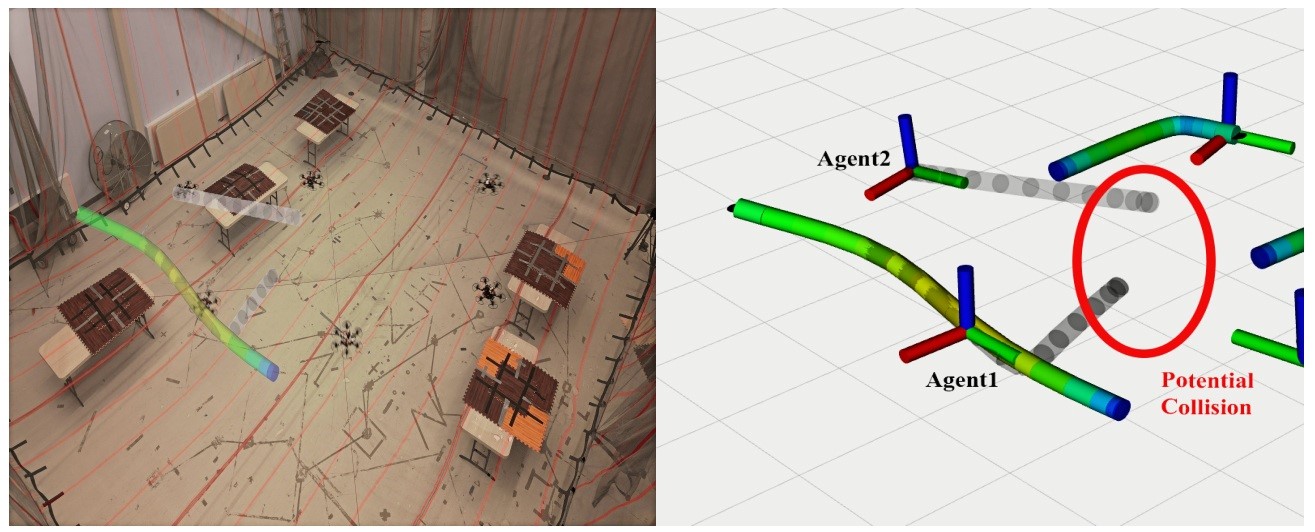
Ovaj višeagentni planer putanje omogućuje jatu dronova da formuliraju optimalne putanje bez sudara. Svaki agent emitira svoju putanju kako bi drugi dronovi znali kamo planira ići. Dronovi tada uzimaju u obzir putanje drugih prilikom optimiziranja vlastitih kako bi osigurali da se ne sudare.
U teoriji fantastično, no pokazalo se da do sudara može doći i kad dron nema ažurirane informacije o putanjama svojih partnera. MIT-ovi istraživači su doradili sustav i tako je nastao Robust MADER, asinkroni, decentralizirani, višeagentni planer putanje koji putanje bez sudara generira čak i kad komunikacija među dronovima kasni.
Dvije putanje
Robust MADER sprečava sudare jer svaki dron ima dvije dostupne putanje; on zadržava sigurnu putanju, već provjerenu radi mogućih sudara. No, dok slijedi tu izvornu putanju, dron optimizira novu, ali je ne koristi prije no što je algoritam provjeri. Ako za vrijeme odgode primi dodatne informacije o putanji od drugih dronova, on odustaje od nove putanje i ponovno pokreće proces optimizacije.
Sve to dakako usporava let, koji s Robust MADER-om postižu brzine od 3,4 metra u sekundi, ali zato postiže stopostotnu stopu uspješnosti u generiranju putanja bez sudara. Duljina razdoblja odgode provjere ovisi o udaljenosti između agenata i raznim faktorima iz okoline koji bi mogli ometati komunikaciju.
Istraživači sad Robust MADER žele testirati i na otvorenom i dronove opremiti vizualnim senzorima kako bi mogli otkriti druge agente ili prepreke, predvidjeti njihovo kretanje i uključiti te informacije u optimizaciju putanje.














