Digger Finger, robotski prst koji "osjeća" predmete zakopane ispod zemlje
Roboti teško raspoznaju stvari zakopane u granulirane materijale. Da bi im to uspjelo, trebaju im prsti, dovoljno tanki da prodru kroz pijesak I dovoljno osjetljivi da opipaju oblik ukopanog predmeta


Istraživači s MIT-a dizajnirali su robotski prst oštrog vrha, opremljen taktilnim senzorom s kojim prepoznaje zakopane predmete. Ovaj robot, prigodno nazvan Digger Finger, uspješno je svladavao zadatke u granuliranim medijima poput pijeska i riže i u njima prepoznavao oblike predmeta s kojima se susretao.
Lovac na zakopane bombe
Istraživači kažu da bi usavršeni Digger Finger mogao obavljati razne podzemne poslove poput pronalaženja zakopanih kabela ili razoružavanja zakopanih bombi.
Ovo dakako nije prvi pokušaj identificiranja predmeta zakopanih u granulirani materijal - pijesak, šljunak i druge vrste labavo zbijenih čestica.
Istraživači su već koristili tehnologije koje odozgo prate što se nalazi pod zemljom, poput zemaljskih probojnih radara ili ultrazvučnih vibracija. Ali ove tehnike pružaju samo maglovit pogled na predmete ispod površine. Na taj je način prilično teško razlikovati kamen od kosti, na primjer.
Ideja je bila izraditi prst koji ima dobar osjećaj dodira i može razlikovati meterijale po opipu. A da bi se to napravilo, trebalo je otkloniti brojne prepreke. Prvi izazov tima bio je stvar forme: robotski prst morao je biti tanak i oštrih vrhova.
Od GelSighta do Digger Fingera
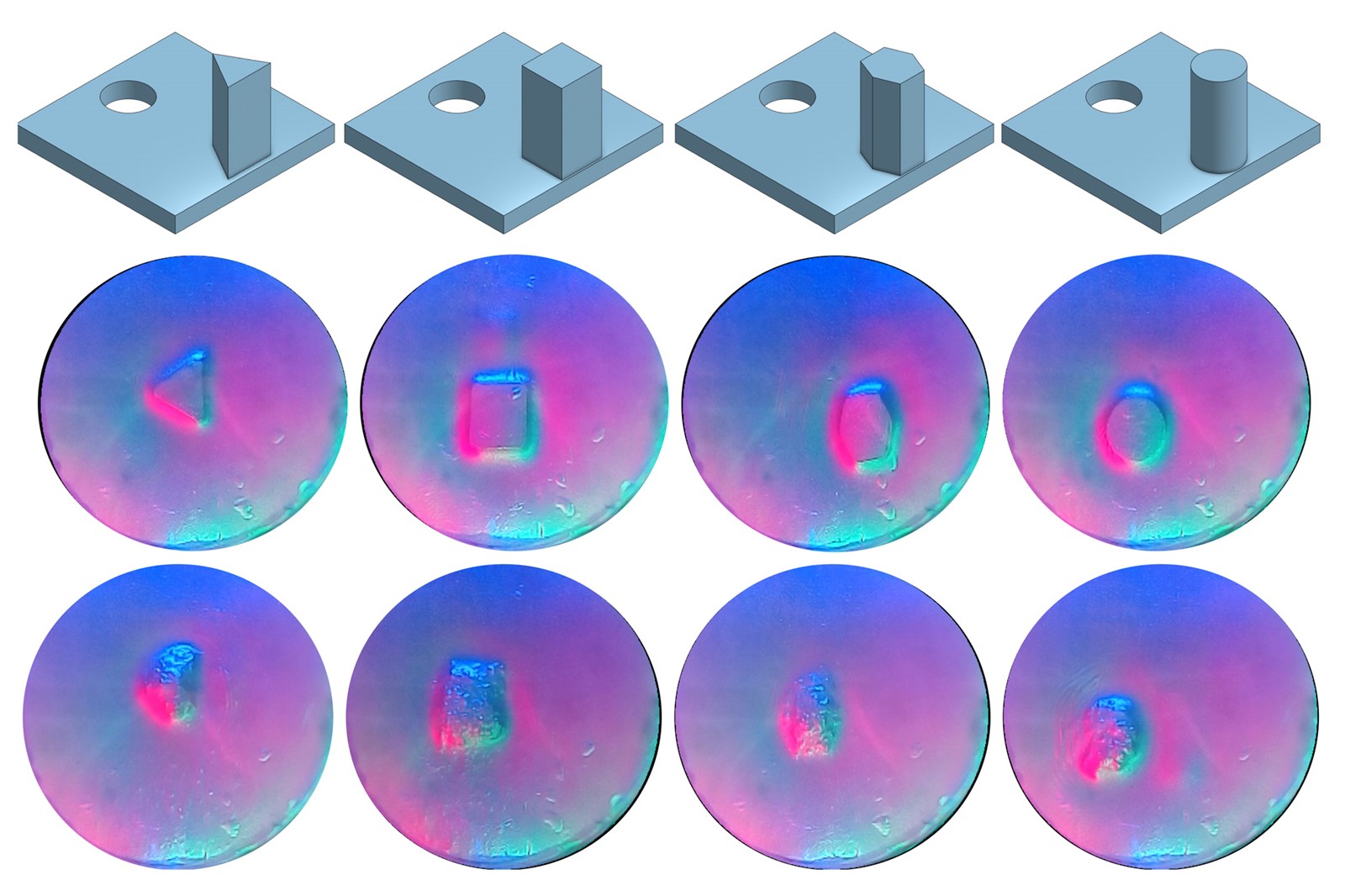
U prethodnom radu istraživači su koristili taktilni senzor GelSight. Senzor se sastojao od bistrog gela prekrivenog reflektirajućom membranom koja se deformirala u kontaktu s nekim predmetom. Iza membrane nalazila su se LED svjetla i kamera koja je hvatala refleksije. Algoritmi računalnog vida zatim su izvlačili 3D oblike područja kontakta mekanog prsta i dodirnutog predmeta. Ova naprava nudila je izvrstan osjećaj umjetnog dodira, ali je bila pretjerano glomazna.
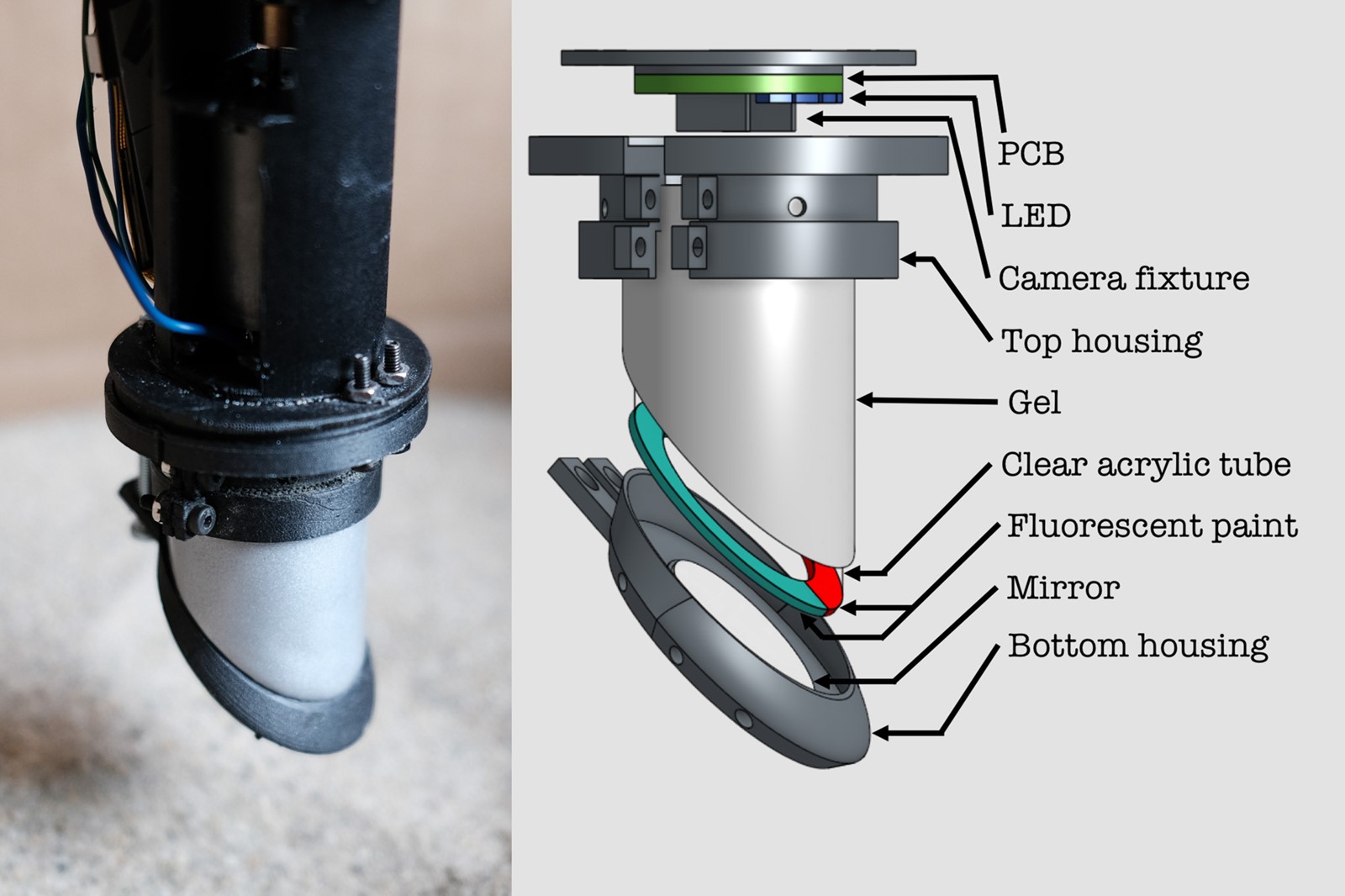
Da bi izradili Digger Finger, istraživači su smanjili GelSight. Promijenili su mu oblik u vitki cilindar sa zakošenim vrhom te izbacili dvije trećine LED svjetla. Tako su dobili uređaj čija taktilna senzorska membrana nije veća od 2 kvadratna centimetra, poput vrha prsta.
Prst su potom ugradili na ruku robota kako bi njime kopali po sitnozrnatom pijesku i krupnozrnatoj riži. Granulirani mediji imaju tendenciju zaglavljivanja, a to pak otežava prodor. Zbog toga su prstu dodali mogućnost vibriranja kako bi Digger Finger mogao rastresti materijal kroz koji treba prodrijeti.
Motor su pokretali pod različitim radnim naponima, mijenjajući amplitudu i frekvenciju vibracija. Otkrili su da brze vibracije pomažu "fluidizaciju" medija, uklanjanju zaglavljivanja i omogućavaju dubljeg ukopavanja, premda je taj efekt teže postići u pijesku nego u riži.
Istraživači planiraju nastaviti istraživati nove pokrete kako bi optimizirali sposobnost Digger Fingera da djeluje u različitim uvjetima i razlikuje bitno od nebitnog.

































