Mekani roboti trče po uzoru na geparde
Objavljen je znanstveni rad koji opisuje mehaniku mekanih silikonskih robota inspiriranih najbržim kopnenim životinjama, a koji mogu naći svoju primjenu u brojnim industrijama

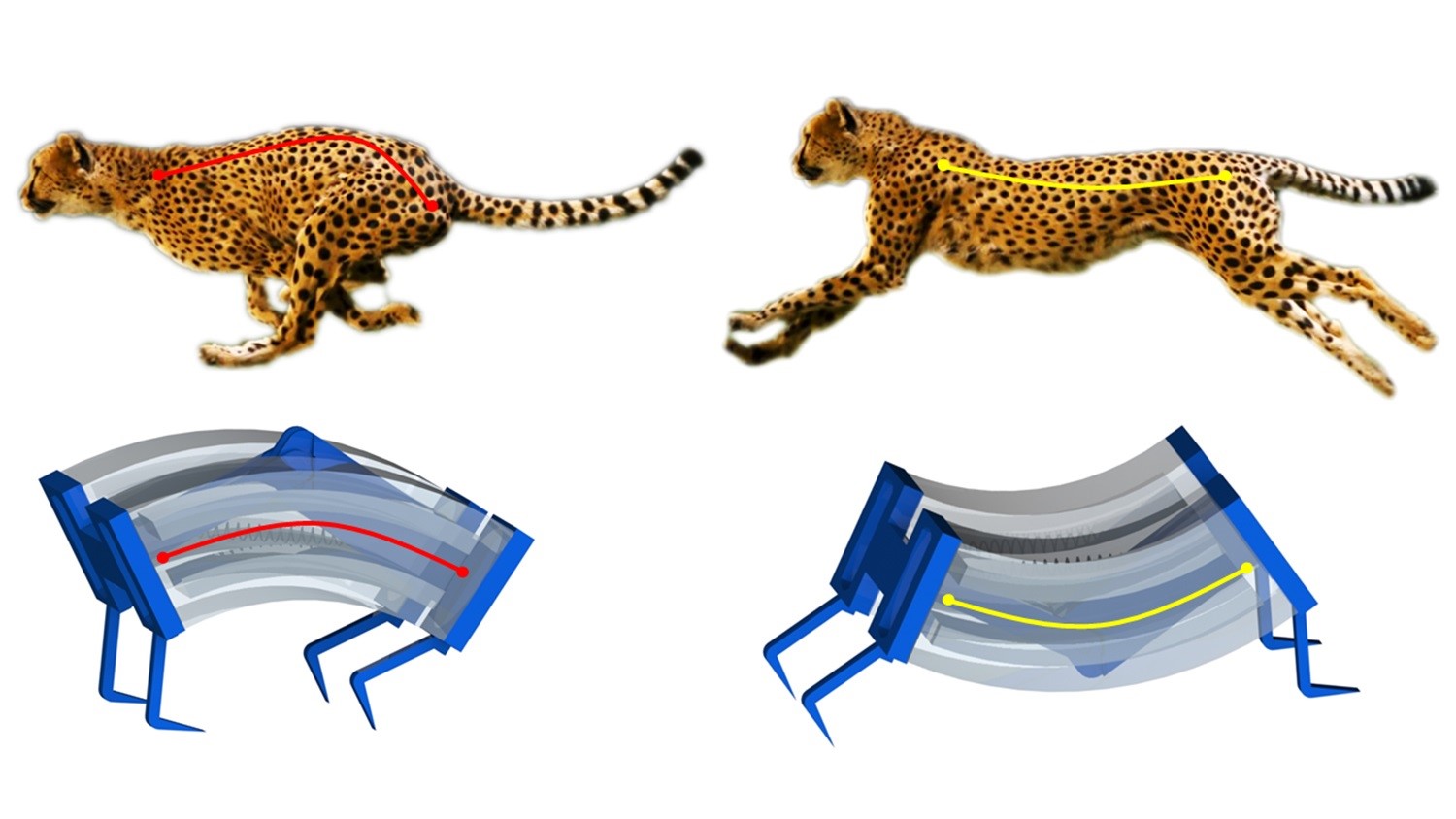
Na sveučilištu u Sjevernoj Karolini razvijena je nova vrsta mekanih fleksibilnih robota koji se mogu iznimno brzo kretati po tlu ili čak plivati pod vodom. Ista tehnologija može se koristiti i za hvatanje objekata mehanizmom poput robotske ruke. U razvoju ovog rješenja znanstvenici su se vodili načinom kretanja najbržih kopnenih životinja, geparda, odnosno načinom na koji oni koriste fleksibilnost svoje kralješnice pri brzom galopiranju. Rezultat možete vidjeti na priloženom videu.
Fleksibilni roboti imaju silikonsko tijelo koje je građeno poput opruge, a pri tome je bistabilno – tj. stabilno je u dva položaja. Pokretanje istih vrši se upumpavanjem zraka u posebne kanale unutar tijela, što dovodi do promjene iz jednog u drugo stabilno stanje robota, a pri čemu se oslobađa dovoljno energije da bi oni "skakutali" po tlu.
Brzi, precizni i snažni
Najbrži slični roboti do sada koristili su "gmizanje" umjesto ovakvog "galopa" i imali su brzinu kretanja od 0,8 dužina vlastitog tijela u sekundi. Rješenje ovih znanstvenika dovelo je do značajnog ubrzanja, pa se sada ovi robotski gepardi nazvani LEAP kreću brzinom od 2,7 dužina tijela u sekundi, a sposobni su čak i penjati se po značajnijim nagibima.
Pridoda li se ovakvom tijelu peraja, fleksibilni roboti u stanju su i plivati. Više njih u kombinaciji mogu djelovati kao robotska ruka te nježno hvatati delikatne predmete, ali i podizati terete teže i od 10 kilograma. Prototip robota koji je korišten za testiranja dug je oko 7 centimetara i teži 45 grama.
Kad je riječ o potencijalnoj komercijalnoj primjeni ovakvih robota, sa Sveučilišta kažu da bi se oni mogli koristiti kao zamjena uobičajenih dijelova industrijskih robota ili onih za traganje i spašavanje – zapravo gdje god je bitna brzina i istodobna preciznost sklopova.























