MIT-ov algoritam umjetne inteligencije dizajnira meke robote koji osjećaju
Da bi mogli izvršavati programirane dužnosti, roboti moraju znati gdje im se nalaze dijelovi tijela. A to nije lagan zadatak za meke robote koji se mogu deformirati na gotovo beskonačan broj načina

Istraživači s MIT-a razvili su algoritam kao ispomoć dizajnerima mekih robota. Algoritam dubokog učenja sugerira optimizirano postavljanje senzora unutar tijela robota, omogućavajući mu bolju interakciju s okolinom i izvršavanje dodijeljenih zadataka. To je još jedan iskorak prema automatizaciji dizajna robota.
Zahtjevni mekani roboti
"Sustav ne uči samo zadani zadatak, već i kako najbolje dizajnirati robota da riješi taj zadatak", kaže doktorand Alexander Amini iz MIT-ovog Laboratorij za računalnu znanost i umjetnu inteligenciju CSAIL. Rezultati istraživanja bit će predstavljeni tijekom travnja na međunarodnoj konferenciji IEEE o mekoj robotici i objavljeni u časopisu IEEE Robotics and Automation Letters.
Stvaranje mekanih robota koji izvršavaju stvarne zadatke dugogodišnji je izazov u robotici. Njihovi kruti kolege imaju ugrađenu prednost: ograničeni raspon pokreta. Ograničeni niz zglobova i udova krutih robota omogućuje proračune pomoću algoritama koji kontroliraju mapiranje i planiranje pokreta. S mekanim robotima situacije je bitno drugačija.
Roboti mekog tijela fleksibilni su i podatni; oni su "beskonačno dimenzionalni", kako ih opsuje drugi MIT-ov doktorand Andrew Spielberg. Odnosno, bilo koja točka na robotu mekog tijela može se, barem u teoriji, deformirati na bilo koji mogući način. Zbog toga je teško dizajnirati mekanog robota koji može mapirati svako mjesto svakog svog dijela tijela.
Nova arhitektura neuronske mreže
Za utvrđivanje položaja robota i vraćanje tih podataka u nadzorni program robota dosad su se koristile vanjske kamere. No, sad su istraživači poželjeli stvoriti mekanog robota nevezanog za vanjsku pomoć.

A pošto se na samog robota ne može staviti beskonačan broj senzora, postavlja se pitanje: s koliko senzora raspolažete i gdje ih stavljate? U traženju odgovora na ta pitanja istraživačima je pomoglo duboko učenje. Razvili su novu arhitekturu neuronske mreže koja istovremeno optimizira postavljanje senzora i uči učinkovito izvršavati zadatke.
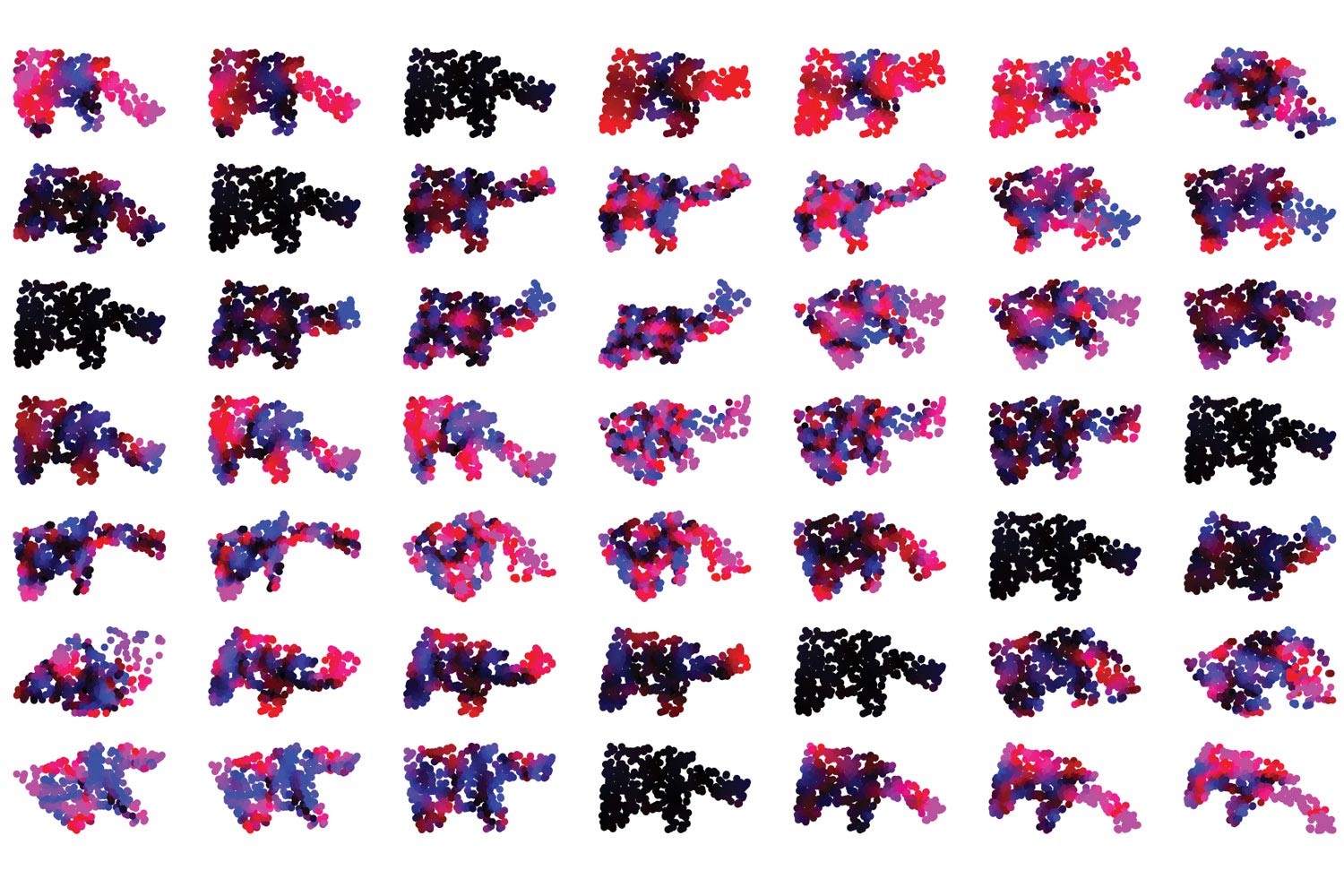
Za početak, tijelo robota podijelili su na "čestice". Procesom pokušaja i pogrešaka mreža uči najučinkovitiji slijed pokreta za izvršavanje zadataka, poput hvatanja predmeta različitih veličina. Istodobno, mreža prati koje se čestice najčešće koriste, a manje korištene čestice oduzima iz skupa.
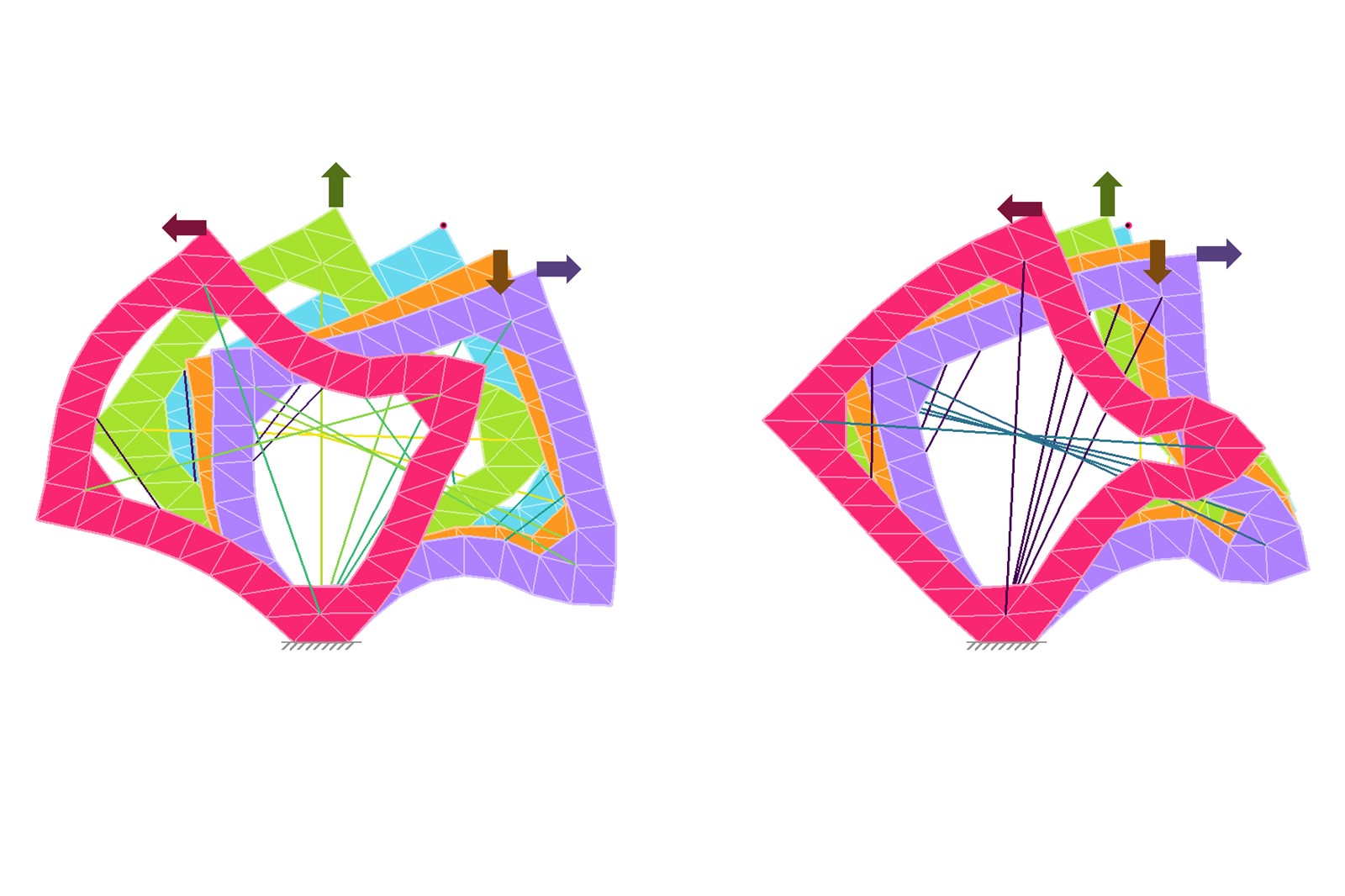
Optimizacijom najvažnijih čestica mreža predlaže gdje se trebaju postaviti senzori kako bi se osigurale učinkovite performanse. Na primjer, u robotu koji hvata ruku algoritam bi mogao predložiti koncentraciju senzora u i oko prstiju. Iako se to može činiti očitim, ispada da je algoritam znatno nadmašio ljudsku intuiciju o tome gdje smjestiti senzore.
Automatizacija procesa
Istraživači su svoj algoritam uspoređivali s nizom stručnih predviđanja. Zamolili su robotičare da ručno odaberu mjesto na koje bi se trebali postaviti senzori kako bi se omogućilo učinkovito izvršavanje zadataka poput hvatanja raznih predmeta. Zatim su izveli simulacije uspoređujući robote čije su performanse odredili ljudi s onima kojima upravljaju algoritmi. Rezultati su bili sve samo ne podudarni. Algoritmi su u svemu bili bolji od ljudi.
Rezultati ovih istraživanja mogli bi pomoći u automatizaciji procesa dizajniranja robota. Bolje postavljanje senzora moglo bi imati primjenu u industriji, posebno tamo gdje se roboti koriste za fine zadatke poput hvatanja.
Automatizacija dizajna osjetljivih mekih robota važan je korak prema stvaranju inteligentnih alata koji pomažu ljudima u fizičkim zadacima. A senzori su važan aspekt procesa, jer omogućavaju mekom robotu da sagleda svijet oko sebe i svoj odnos prema okolini, zaključuju istraživači s MIT-a.