Novi algoritam za sigurnije autopilotiranje
MIT-ovo rješenje premašuje sigurnost postojećih metoda i nudi deseterostruko povećanje stabilnosti


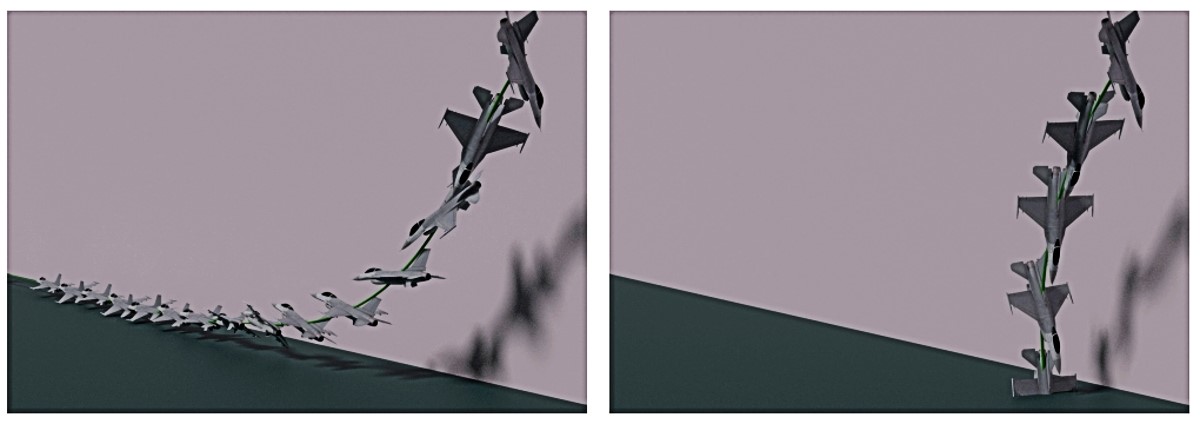
U filmu "Top Gun: Maverick" Tom Cruise podučava mlade pilote kako da u niskom, brišućem letu ulete mlažnjacima u stjenoviti kanjon i izjure iz njega pod oštrim kutom. Ljudima to uspijeva, no strojevi se muče s takvim zadacima.
Novi pristup
Autonomnim letjelicama najizravnija putanja prema meti u suštoj je suprotnosti s onim što stroj treba učiniti kako bi izbjegao stijene ili ostao neotkriven. Mnoge postojeće metode umjetne inteligencije ne mogu prevladati ovaj sukob, poznat kao problem stabilizacije i izbjegavanja (stabilize-avoid problem).
Istraživači MIT-ovog Laboratorija za informacijske i sustave odlučivanja (LIDS) razvili su novu tehniku koja ove složene probleme rješava bolje od drugih metoda. Njihov pristup strojnog učenja premašuje sigurnost postojećih metoda i nudi deseterostruko povećanje stabilnosti. U eksperimentu koji bi Mavericka učinio ponosnim, njihovo je rješenje učinkovito pilotiralo simuliranim mlaznim zrakoplovom kroz uski koridor, bez sudara s tlom.
Ekstremni scenariji
Ovom tehnikom, predstavljenom na arXiv.org, mogli bi se, vjeruju istraživači, opremiti kontroleri visokodinamičnih robota koji moraju zadovoljiti zahtjeve sigurnosti i stabilnosti, poput autonomnih dronova za dostavu. Ili bi se mogla implementirati kao dio većeg sustava, na primjer kao algoritam koji se aktivira samo kad automobil proklizava na snježnoj cesti kako bi pomogao vozaču da se sigurno vrati na stabilnu putanju. Uostalom, navigacija u ekstremnim scenarijima s kojima se čovjek ne može nositi glavni je adut ovog rješenja.
Istraživači žele poboljšati svoje rješenje i istražiti koliko dobro algoritam radi kad se postavi na hardver, zbog nepodudarnosti između dinamike modela i one u stvarnom svijetu.






















